
【導(dǎo)讀】我們可通過傳感技術(shù)來獲取有關(guān)周圍環(huán)境的信息,從而使我們的日常生活受益:提高任務(wù)效率,增強安全性,或純粹出于娛樂目的。LiDAR是這樣一種傳感技術(shù),使用激光來測量到物體的距離,并可用于創(chuàng)建周圍環(huán)境的3D模型。LiDAR 系統(tǒng)捕獲的圖像中的每個像素都將具有與之關(guān)聯(lián)的深度。這樣可以更好地識別物體,并消除僅采用圖像傳感器獲得的2D圖像中可能存在的模糊。
LiDAR如何構(gòu)建3D點云?
LiDAR 通常使用直接飛行時間(dToF)技術(shù)來測量到物體的距離。短的激光脈沖發(fā)出后,其中的一些光被場景中的對象反射回并被傳感器如ArrayRDM-0112A20-QFN探測到,以準(zhǔn)確記錄激光脈沖往返所用時間(見圖1)。使用已知的光速,基于此dToF測量可計算出距離。這是視場內(nèi)的單距離測量。
為了構(gòu)建周圍環(huán)境的完整圖片,需要在場景中的許多不同位置重復(fù)進行此點測量。這可通過安裝固定的傳感器和讓激光在整個場景中旋轉(zhuǎn)和掃描,或使用光束操控(beam steering)技術(shù)如微機電系統(tǒng) (MEMS) 鏡來實現(xiàn)。
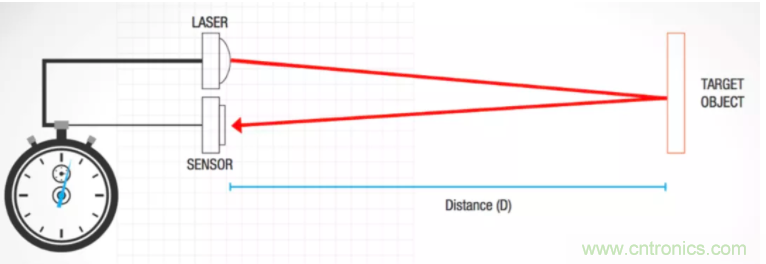
圖1:dToF技術(shù)示意圖
LiDAR系統(tǒng)通常依賴于以下關(guān)鍵組件:照明源,傳感器,光學(xué)器件,光束操控,信號處理和電源管理(圖2)。在性能方面,最關(guān)鍵的要素是照明源和傳感器。照明通常受用眼安全考量的限制,因此對系統(tǒng)性能的最大影響通常取決于傳感器。
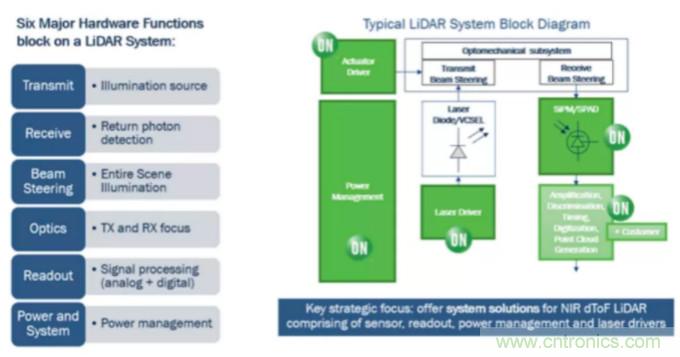
圖2:剖析含傳感器的dToF LiDAR系統(tǒng)
在許多場景下,系統(tǒng)運行只有有限的信號返回,從遠處或低反射率物體返回的信號可能只包含少量的光子。因此,傳感器應(yīng)盡可能靈敏。
LiDAR傳感器的靈敏度受不同因素綜合影響。首先,最重要的是探測效率,即入射光子將產(chǎn)生信號的概率。然后是對低入射通量或最小可檢測信號的靈敏度。某些傳感器如PIN二極管沒有內(nèi)部增益,因此單個探測到的光子將不會記錄傳感器固有噪聲以上的信息。
雪崩光電二極管(APD)具有一定的內(nèi)部增益(?100x),但是,由少量光子組成的入射信號不會記錄噪聲以上的信息,這要求它在一定的持續(xù)時間內(nèi)對返回的信號進行整合。工作在蓋革(Geiger)模式下的傳感器,如硅光電倍增管(SiPM) 和單光子雪崩二極管(SPAD)的內(nèi)部增益約百萬級(1,000,000x),因此,單個光子也會產(chǎn)生信號,即使在內(nèi)部傳感器噪聲以上的信息也能可靠地探測到。這允許設(shè)置一個低閾值來探測最微弱的返回信號。
雖然SiPM和SPAD由于高增益而克服了許多噪音問題,但在實際的LiDAR應(yīng)用中還需考慮到另一個噪聲源-環(huán)境太陽光或處于陽光下。我們常力求探測非常微弱的LiDAR返回信號,同時受到不想要的太陽光照射。因此,問題變成了最大化其中的一個信號(返回的激光),同時忽略或最小化噪聲(陽光)。一種方法是利用傳感器的單光子靈敏度,并尋找時間相關(guān)的光子。
這種多次dToF測量的方法是通過多次重復(fù)該過程(每次通過多個激光脈沖得出一個dToF測量值)來實現(xiàn)的。無需為每次測量計算距離,而是將每個飛行時間(ToF)值添加到直方圖或分布圖。結(jié)果是一個如圖3所示的曲線圖。
背景計數(shù)在時間上不相關(guān)-也就是說,相對于脈沖發(fā)射時間,它們在時間上隨機到達。這些計數(shù)可以忽略不計,因為它們是由于陽光引起的噪聲。峰值代表時間相關(guān)的計數(shù)-大量計數(shù)都以相同的時間值到達,表明是來自目標(biāo)的信號。該峰值可以轉(zhuǎn)換為特定幀的距離,且該過程可再次開始。即使每幀每像素有幾十個激光周期,也可以實現(xiàn)30 fps的幀速率。

圖3:LiDARToF直方圖例
盡管SiPM 或SPAD傳感器可通過結(jié)合單光子靈敏度與時間相關(guān)技術(shù)來查看微弱的返回信號,但PIN二極管或APD傳感器會丟失在太陽背景中丟失的計數(shù)。因此,用這些其他傳感器類型進行測距根本無法達到那么遠或那么高效。
現(xiàn)實世界中如何利用深度信息?LiDAR如何提供幫助?
迄今為止,消費者移動應(yīng)用程序僅通過圖像傳感器技術(shù)如使用結(jié)構(gòu)光就已啟用了許多功能。飛行時間(ToF)技術(shù)已在某種程度上被整合到手機中數(shù)年,以添加深度感知并賦能攝影功能,如快速自動對焦和“散景”人像效果。
最近,dToF成像LiDAR傳感器已集成到最新的消費類移動設(shè)備中,它比以前的技術(shù)提供更好的深度信息,且無疑將大大增加利用此數(shù)據(jù)的移動應(yīng)用程序數(shù)。3D信息可用于實現(xiàn)3D繪圖應(yīng)用程序和改進的擴增實境和虛擬實境(AR / VR)體驗。
在汽車和工業(yè)應(yīng)用中,安全性很重要,僅用圖像傳感器識別物體然后進行自動決策和導(dǎo)航有局限性,這凸顯了需要通過融合不同的傳感模式來獲取更多信息。LiDAR結(jié)合其他傳感技術(shù)如相機、超聲波和雷達,可提供更多的冗余,從而提高負責(zé)導(dǎo)航或與環(huán)境交互的決策算法的置信度。這些技術(shù)中的每一種都有獨特的特性,可提供不同層面的信息,在不同情形下各有利弊。

圖4:對比不同的傳感器技術(shù)
要在汽車中啟用高性能LiDAR系統(tǒng),高度靈敏的傳感器如SiPM是最高效的接收器。安森美半導(dǎo)體的SiPM提供了無與倫比的性能和工作參數(shù):高光子探測效率,低噪聲和暗計數(shù)率結(jié)合低工作電壓,感溫性和工藝一致性。
ArrayRDM-0112A20-QFN是12像素線陣SiPM,解決市場對LiDAR的需求。它在905 nm處具有領(lǐng)先業(yè)界的18%光子探測效率,905 nm是高性價比的廣泛LiDAR系統(tǒng)市場的典型波長。此外,它是市場上首個商用現(xiàn)貨線陣SiPM和首個符合車規(guī)的 SiPM。了解有關(guān)ArrayRDM-0112A20-QFN的更多信息,或查看我們下面的設(shè)計資源!
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進行處理。
推薦閱讀:




