
【導(dǎo)讀】最近這幾年充電模塊是熱門,從最開始的7.5kW、10kW 到后面的15kW、20kW,功率等級不斷的提高。市場上的充電模塊絕大部分都是三相輸入,PFC 部分也基本都是采用的三相無中線 VIENNA 結(jié)構(gòu)的拓撲。借這次技術(shù)分享的機會,分享一下個人對「三相VIENNA 拓撲」的理解,希望和大家一起探討交流。
我會從以下幾個方面進行說明:
① 主電路組成
② 工作原理
③ 控制模式
④ 控制地的選擇
⑤ 母線均壓原理
⑥ 原理仿真
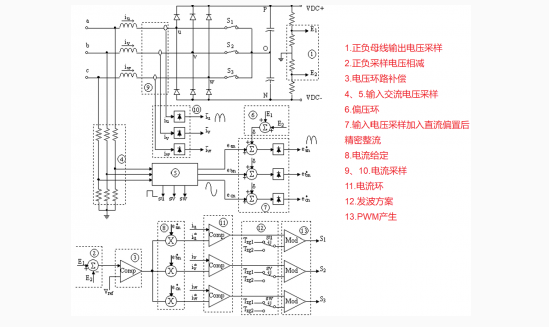
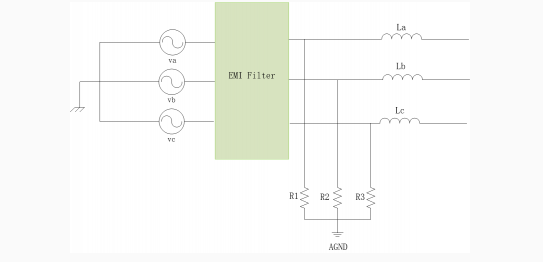
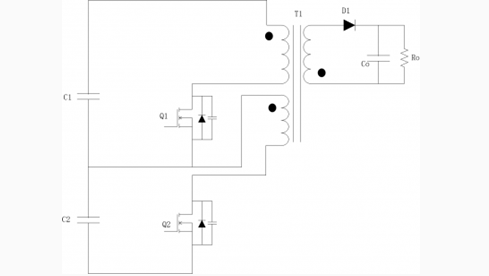
一、主電路的組成如圖所示,是三相 VIENNA PFC 拓撲的主電路,大致如下:
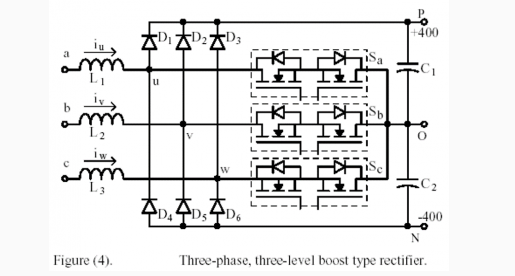
1. 三相二極管整流橋,使用超快恢復(fù)二極管或 SiC 二極管;
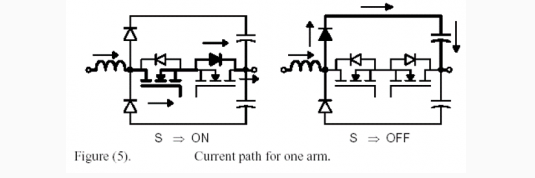
2. 每相一個雙向開關(guān),每個雙向開關(guān)由兩個 MOS 管組成,利用了其固有的反并聯(lián)體二極管,共用驅(qū)動信號,降低了控制和驅(qū)動的難度。相比其他組合方案,具有效率高、器件數(shù)量少的優(yōu)點;3. 電流流過的半導(dǎo)體數(shù)量最少,以 a 相為例: ? 雙向開關(guān) Sa 導(dǎo)通時,電流流過2個半導(dǎo)體器件,euo=0,橋臂中點被嵌位到 PFC 母線電容中點; ? 雙向開關(guān)關(guān)斷時,電流流過1個二極管,iu>0 時euo=400V,iu<0 時 euo=-400V,橋臂中點被嵌位到PFC 正母線或負母線。
二、工作原理
電路的工作方式靠控制 Sa、Sb、Sc 的通斷,來控制 PFC 電感的充放電,由于 PFC 的PF 值很接近1,在分析其工作原理時可以認為電感電流和輸入電壓同相,三相點平衡,并且各相差120度; 1. 主電路的等效電路① 三相三電平 Boost 整流器可以被認為是三個單相倍壓 Boost 整流器的 Y 型并聯(lián);② 三個高頻 Boost 電感,采用 CCM 模式,減少開關(guān)電流應(yīng)力和 EMI 噪聲;③ 兩個電解電容構(gòu)成電容中點,提供了三電平運行的條件;
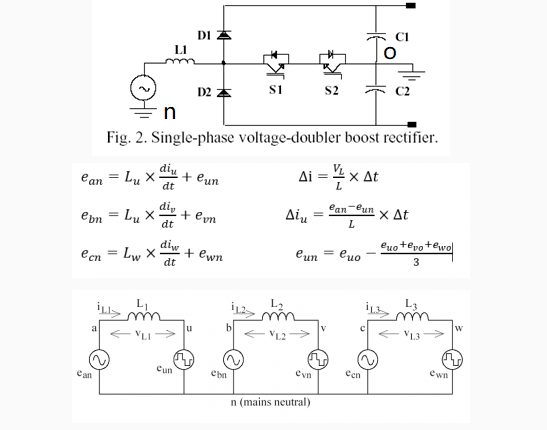
這個 eun 的表達式非常重要。
2. 主電路的開關(guān)狀態(tài)三相交流電壓波形如下,U、V、W 各相差120度
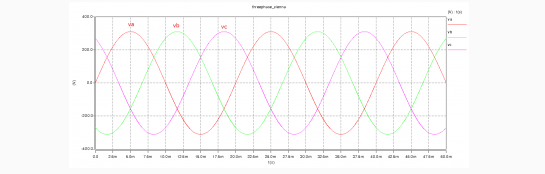
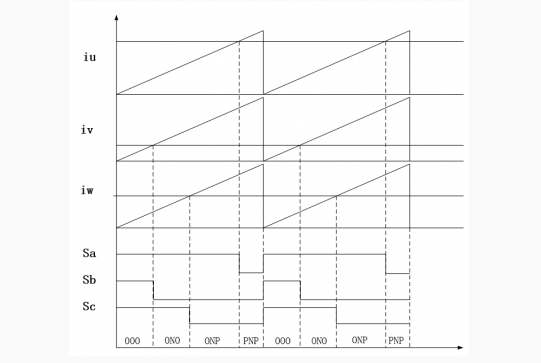
三相交流電壓波形 通過主電路可以看出,當每相的開關(guān) Sa、Sb、Sc 導(dǎo)通時,U、V、W 連接到電容的中點 O,電感 La、Lb、Lc 通過 Sa、Sb、Sc 充電,每相的開關(guān)關(guān)斷時,U、V、W 連接到電容的正電平(電流為正時)后者負電平(電流為負時),電感通過 D1-D6 放電,以0~30度為例,ia、ic 大于零,ib 小于零。 每個橋臂中點有三種狀態(tài),三個橋臂就是3^3=27種狀態(tài),但不能同時為 PPP 和 NNN 狀態(tài),故共有25種開關(guān)狀態(tài)(見下期下載鏈接)。 3. 主電路的發(fā)波方式主電路的工作狀態(tài)與發(fā)波方案有較大的關(guān)系,采用不同的發(fā)波方案會在每個周期產(chǎn)生不同的工作狀態(tài)。一般Vienna 拓撲采用 DSP 數(shù)字控制,控制靈活,可移植性強。① 采用單路鋸齒波載波調(diào)制電流環(huán)控制器輸出的調(diào)制信號被饋送給鋸齒波載波,保持恒定的開關(guān)頻率; 在0~30度這個扇區(qū)內(nèi),每個周期產(chǎn)生4個開關(guān)狀態(tài),由于波形不對稱,電流波形的開關(guān)紋波的諧波比較大;采用該種方式進行調(diào)試,橋臂中點線電壓的最大步進是2Ed(Ed 為母線電壓的一半,400V);
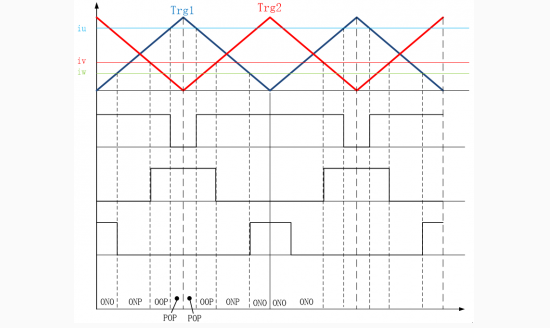
② 采用相位相差180度的高頻三角載波,當對應(yīng)的輸入電壓是正半周的時候,采用 Trg1,當對應(yīng)的輸入電壓是負半周的時候采用 Trg2,每個周期產(chǎn)生8個開關(guān)狀態(tài),與傳統(tǒng)的控制方案產(chǎn)生4個開關(guān)狀態(tài)相比,8個開關(guān)狀態(tài)相當于頻率翻倍,減小了輸入電流的紋波,對 THD 指標有好處;
上一張仿真的波形:
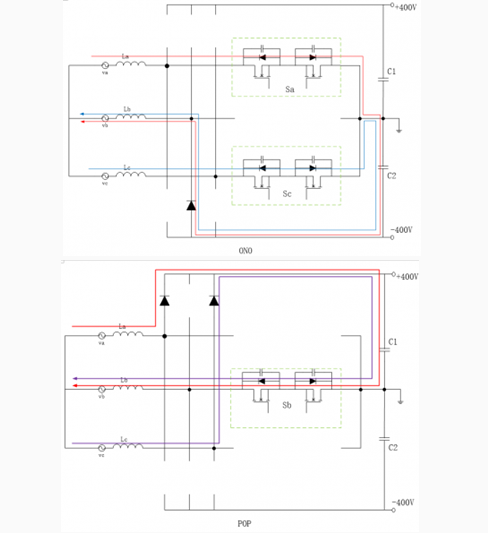
上面我們提到,三相三電平 PFC 可以看作是三個單相的 PFC,每個單相相當于由兩個 Boost 電路組成,在交流電壓的正負半周交替工作,正半周如下所示:
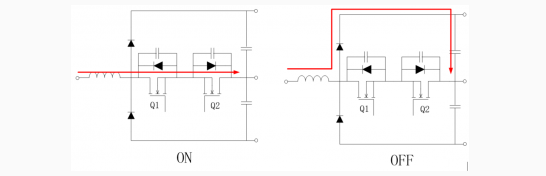
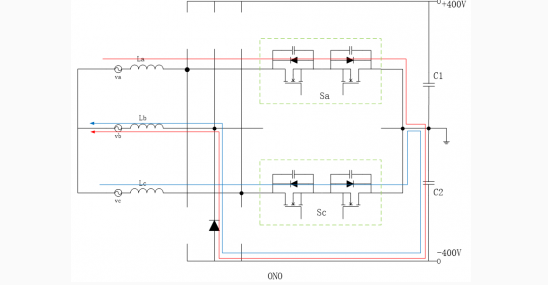
以 a 相為例,驅(qū)動信號為高時,則開關(guān)管 Q1 導(dǎo)通(交流電壓的正半周) 或者 Q2 導(dǎo)通 (交流電壓的負半周);驅(qū)動信號為低時,開關(guān)管 Q1 和 Q2 都關(guān)斷。電壓正半周時,a相上橋臂二極管導(dǎo)通;電壓負半周時,a 相下橋臂二極管導(dǎo)通。 通過上面的分析,采用移相180度的三角載波進行調(diào)制,在0~30度的扇區(qū)內(nèi)有8種開關(guān)狀態(tài),4種工作模式ONO,ONP,OOP,POP。 ① ONO 工作模式
a 相和 c 相導(dǎo)通,b 相截至,U 和 W 電壓為0,V 點電壓-400V;該工作狀態(tài)只給C2 進行充電;
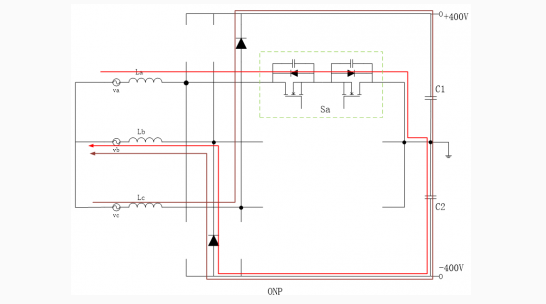
② ONP 工作模式
a 相導(dǎo)通,b 相和 c 相截至;U 點電壓為0,V 點電壓為-400V,W 點電壓為+400V;
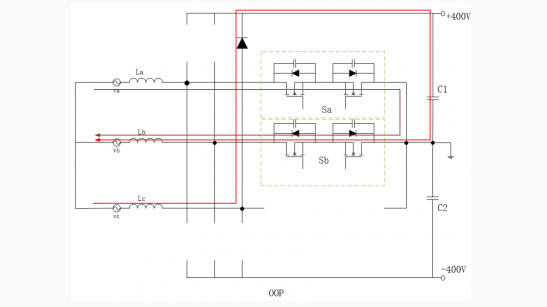
③ OOP 工作模式
U 和 V 點電壓為0,W 點電壓為+400V;
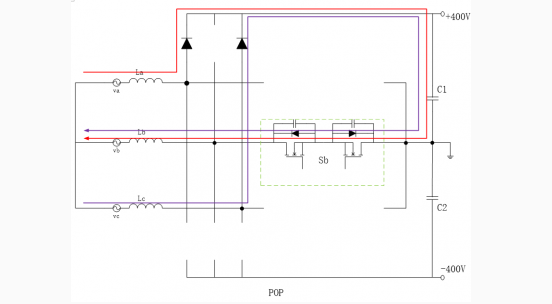
④ POP 工作模式
U 和 W 點電壓為+400V,V 點電壓為0,該工作模式只給 C1進行充電;
當然,這只是在0~30度扇區(qū)的工作狀態(tài)。其實在整個工頻周期,是有25個工作狀態(tài)的。
ONO 和 POP 這兩種工作模式只給C1 或 C2 充電的狀態(tài)對后面母線電壓均壓起決定性的作用。 我們知道,DSP 的 PWM 模塊的載波方式不能改變,一般是無法使 DSP 產(chǎn)生幅值相同、相移180度的載波時基.可以用正負半周不同方式實現(xiàn),具體實現(xiàn)方式如下:
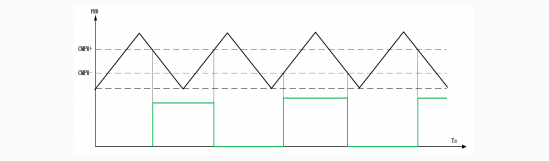
在正半周的時候跟 CMPR+比較,在負半周的時候跟 CMPR-比較。正半周的時候低有效,負半周的時候高有效。這樣就可以產(chǎn)生180度的相移了,其中 CMPR-是PI 計算出來的值,而 CMPR+=PRD-CMPR- 三、控制模式我們知道,這種控制電路一般采取雙環(huán)的控制方式,即電壓外環(huán)+電流內(nèi)環(huán)。電壓外環(huán)得到穩(wěn)定的輸出直流電壓,供后級電路的使用(如 ThreeLevel LLC、PS Interleave LLC、PSFB等),電流內(nèi)環(huán)得到接近正弦的輸入電流,滿足 THD 和 PF 值的要求。
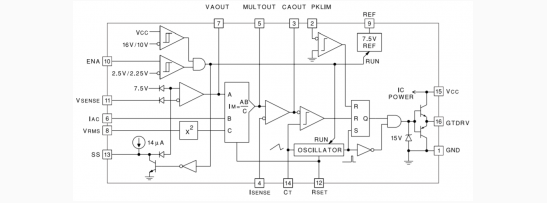
其實數(shù)字控制無非就是把模擬的方案轉(zhuǎn)換為數(shù)字的運算,其中最經(jīng)典可以參考 TI 的 UC3854,利用它的控制思想來實現(xiàn)數(shù)字化。
PFC 母線輸出電壓經(jīng)過采樣和濾波,由 DSP 的 ADC 采樣到 DSP 內(nèi)部,與電壓給定信號進行比較,產(chǎn)生誤差后經(jīng)過 Gvc(s) 補償后輸出一個 A 信號,然后通過乘法器與交流 AC 電壓相乘得到電流的給定信號,正是該乘法器的作用才能保證輸入電壓電流同相位,使電源輸入端的 PF 值接近1; 將采樣的電感電流波形與電流給定進行比較得出誤差,經(jīng)過 Gic(s) 補償器進行補償后得到電流環(huán)的輸出值,該值直接與三角波進行調(diào)制,得到PWM 波形,控制電壓和電流;大致的控制框圖可以用下圖來簡化表示;
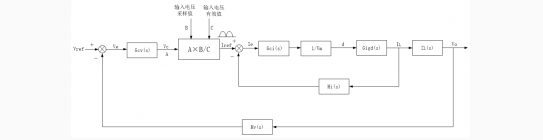
其中:?Gcv(s) 電壓環(huán)的補償函數(shù)? Gci(s) 為電流環(huán)的補償函數(shù)? Hi(s) 為電流環(huán)采樣函數(shù)? Hv(s) 為電壓環(huán)采樣函數(shù)? Gigd(s) 為電感電流對占空比 D 的函數(shù)
四、控制地 AGND 的選擇
在傳統(tǒng)的單相有橋 PFC 中,一般把 PFC 電容的負極作為控制 AGND,因為該點的電壓通過整流橋跟輸入的 L、N 相連。 ? 當輸入為正半周時,AGND 為整流橋鉗位在 N 線;? 當輸入為負半周時,AGND 被整流橋鉗位在 L 線; 所以母線電容的負極地 AGND(相當于 PE)是一個工頻的變化,由于輸入一般都是50Hz 的交流電,所以相對還是比較穩(wěn)定的,可以作為控制電路的控制地。但是相比較 Vienna PFC 就不一樣了,母線電容的中點相對與工頻電壓中點 (PE) 是一個開關(guān)級的5電平高頻變動的電平:±2/3Vo、0、±1/3Vo(這里的 Vo 代表母線電壓的一半,典型值400V),如果以如此大的高頻波動去作為控制地的話,那么噪聲和共模干擾就會非常大,可能會導(dǎo)致采樣電壓和驅(qū)動不準確,嚴重影響到電路的可靠性。由于電容中點的高頻變化不能作為控制地,那怎么辦?我們是否可以人為的構(gòu)建一個虛擬的地來作為控制地 AGND? 我們可以采用在三相輸入之間通過分壓電阻相連,采用 Y 型接法來產(chǎn)生虛擬地作為控制地。不過構(gòu)建了這個控制地后,那么其他所有的采樣、驅(qū)動都要以差分和隔離的方式相對于這個控制地來工作。 采用這種方法,是不是完美的把電容中點 O 與控制地 AGND 分開了,避免了高頻劇烈變動帶來的干擾。
五、母線均壓
我們知道,三相 Vienna PFC 拓撲的母線電壓 800V 是由兩個電容 C1 和 C2 串聯(lián)進行分壓,電容中點的電位 O 由電容的充放電決定,兩個電容的電壓應(yīng)該保持均衡以保持真實的三電平運行條件。否則輸出電壓可能包含不期望的諧波,甚至會影響到電路的完全性。 三相三電平 PFC 正負母線的均衡度會影響 PFC 的性能:① 輸入電流 THD② 功率開關(guān)管和二極管的應(yīng)力 (本身以及后級功率電路)③ 動態(tài)時母線電容容易過壓 電容中點的電位偏差與 PFC 正負母線電容的充放電過程相關(guān),通過附件開關(guān)狀態(tài)可以看出,a 組和 z 組工作狀態(tài)沒有電流流入或流出電容中點,因此兩個電容的充放電是一樣的,不會產(chǎn)生偏壓。只有 b、c、d 組的開關(guān)狀態(tài)才會影響到 PFC 母線電容充放電的差異,產(chǎn)生偏壓。根據(jù)前面的工作原理分析,POP 工作狀態(tài)只給電容 C1 進行充電,ONO 工作狀態(tài)只給電容 C2 進行充電,故可以根據(jù)這兩個工作狀態(tài)來控制中點電位,在控制中可以調(diào)節(jié) ONO 和 POP 兩個工作狀態(tài)的作用時間來進行均壓。
這個時候可以在整個控制環(huán)路中添加一個偏壓環(huán),用于調(diào)節(jié) ONO 和 POP 的作用時間,來進行母線電壓的均壓作用。 具體實施方法:分別對正母線和負母線進行采樣,然后得出差值 (直流分量),該差值經(jīng)過偏壓環(huán)的補償器調(diào)節(jié)之后疊加到輸入電流參考正弦波,經(jīng)過精密整流后變換為幅值有差異的雙半波作為電流環(huán)的給定,以此來改變 ONO 和 POP 的作用時間,改善PFC 母線均壓。
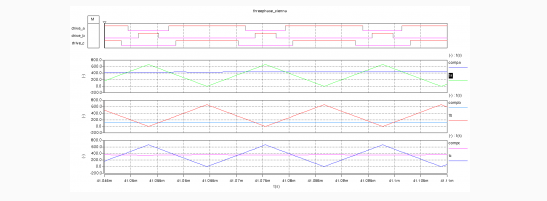
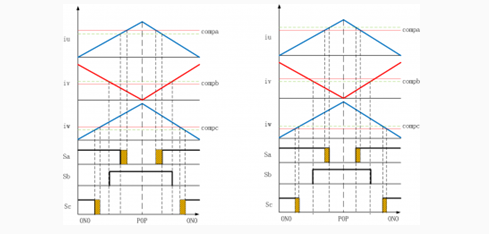
如下圖所示:compa、compb 和 compc 分別是每相的電流環(huán)計算出來的結(jié)果,以0~30度扇區(qū)為例,當正母線相對于中點的電壓低于負母線時,正半波的給定變小,負半波的給定變大,POP 工作狀態(tài)的時間變長,給正母線電容的充電時間變長;
ONO 工作狀態(tài)的時間變短,給負母線電容的充電時間變短。當正母線相對于中點的電壓高于負母線時,正半波的給定變大,負半波的給定變小,POP 的作用時間變長,給正母線電容充電的時間變短,ONO 的作用時間變長,給負母線的充電時間變長。 圖中comp 值實線代表上個周期的值,虛線代表當周期需要的值;陰影部分代表變化的時間;
以上說明的是主功率回路正常工作時候可以通過調(diào)節(jié)來控制 PFC 母線電容的均壓,但是當模塊起機的時候呢? 可以采用輔助電源直接從+400V~-400V 之間進行取電,由于電容有差異性,內(nèi)阻不可能完全相等,也會差生偏壓。 還有一個是要采用更高等級的 MOSFET,成本高,而且現(xiàn)在充電模塊的待機損耗也是一個問題,很多客戶要求模塊的待機損耗不能超過多少。 當然還有另一種輔助電源取電方式,也是現(xiàn)在廠家主流的方式。就是正負母線均掛一個輔助電源,在起機的時候通過充電電阻給母線電容充電,變壓器采用繞組競爭的方式,誰的母線電壓高,就采用誰供電,這樣可以很好的保證模塊在起機過程中的均壓效果;在模塊正常工作起來以后,也是同樣的道理。而直接從+800V 取電沒有這種效果。
六、原理仿真
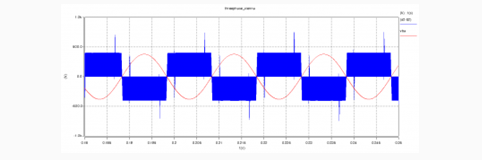
1. 輸出電壓波形
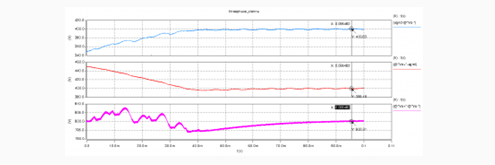
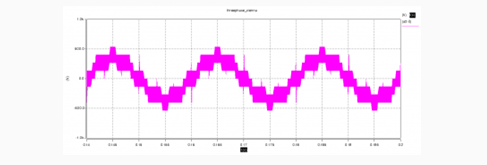
2. 仿真波形輸入電流波形,參數(shù)沒有調(diào)好,將就著看吧。
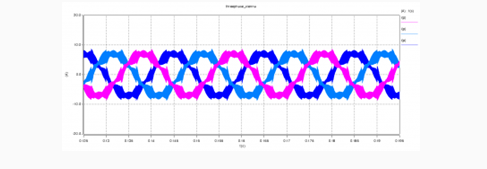
輸三相電流波形
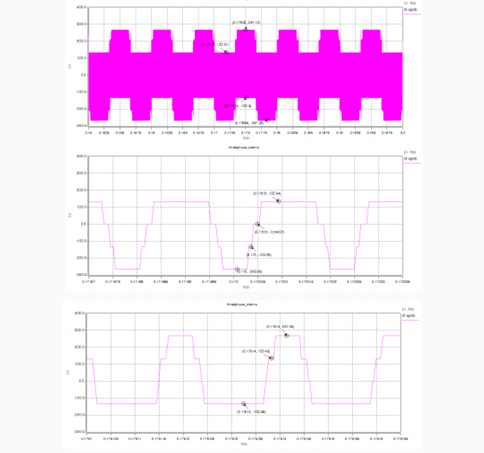
3. 橋臂中點的線電壓輸入線電壓峰值與 PFC 總母線電壓的比值定義為調(diào)制系數(shù) m,m=Vlp/2Ed; 其中 Vlp 是線電壓的峰值。 整流器可以被認為是與市電通過 PFC 電感連接的電壓源,為了使輸入電流正弦,橋臂中點線電壓也應(yīng)該為正弦波形。而實際情況下橋臂中點線電壓是正弦 PWM 波形,諧波分量和最大步進是兩個主要考慮的因素。 ① 當輸入線電壓峰值大于 Ed 時,橋臂中點線電壓電壓波形 euv,是一個5階梯的電壓波形,幅值為0,±400V,±800V,步進是400V;
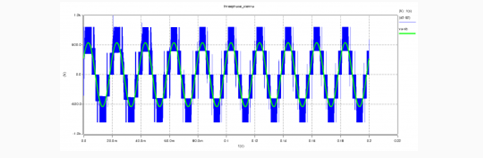
② 當輸入線電壓峰值小于 Ed 時,橋臂中線線電壓波形是一個3階梯的電壓波形,幅值為0,±400V,步進為400V;
橋臂中點相對于市電中點的電壓波形 eun,是一個9階梯的電壓波形;幅值為0,±133V,±266V,±400V,最小步進是133V,最大步進是266V;由于功率開關(guān)管和散熱器之間有寄生電容,這個階梯信號會產(chǎn)生共模噪聲;
電容中點O 相對于市電中點的電壓波形 eon,是一個5階梯波形,幅值為0,±133V,±266V,步進為133V;
免責聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進行處理。
推薦閱讀:

