

【導(dǎo)讀】高斯濾波器是一種線性濾波器,能夠有效的抑制噪聲,平滑圖像。其作用原理和均值濾波器類似,都是取濾波器窗口內(nèi)的像素的均值作為輸出。本文主要介紹了高斯濾波器的原理及其實(shí)現(xiàn)過(guò)程。
其窗口模板的系數(shù)和均值濾波器不同,均值濾波器的模板系數(shù)都是相同的為1;而高斯濾波器的模板系數(shù),則隨著距離模板中心的增大而系數(shù)減小。所以,高斯濾波器相比于均值濾波器對(duì)圖像個(gè)模糊程度較小。
什么是高斯濾波器
既然名稱為高斯濾波器,那么其和高斯分布(正態(tài)分布)是有一定的關(guān)系的。一個(gè)二維的高斯函數(shù)如下:
其中(x,y)(x,y)為點(diǎn)坐標(biāo),在圖像處理中可認(rèn)為是整數(shù);σσ是標(biāo)準(zhǔn)差。要想得到一個(gè)高斯濾波器的模板,可以對(duì)高斯函數(shù)進(jìn)行離散化,得到的高斯函數(shù)值作為模板的系數(shù)。例如:要產(chǎn)生一個(gè)3×33×3的高斯濾波器模板,以模板的中心位置為坐標(biāo)原點(diǎn)進(jìn)行取樣。模板在各個(gè)位置的坐標(biāo),如下所示(x軸水平向右,y軸豎直向下)
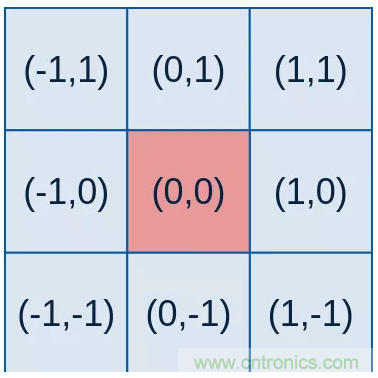
這樣,將各個(gè)位置的坐標(biāo)帶入到高斯函數(shù)中,得到的值就是模板的系數(shù)。
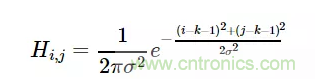
對(duì)于窗口模板的大小為(2k+1)×(2k+1),模板中各個(gè)元素值的計(jì)算公式如下:
這樣計(jì)算出來(lái)的模板有兩種形式:小數(shù)和整數(shù)。
小數(shù)形式的模板,就是直接計(jì)算得到的值,沒(méi)有經(jīng)過(guò)任何的處理;
整數(shù)形式的,則需要進(jìn)行歸一化處理,將模板左上角的值歸一化為1,下面會(huì)具體介紹。使用整數(shù)的模板時(shí),需要在模板的前面加一個(gè)系數(shù),系數(shù)為

也就是模板系數(shù)和的倒數(shù)。
高斯模板的生成
知道模板生成的原理,實(shí)現(xiàn)起來(lái)也就不困難了
void generateGaussianTemplate(double window[][11], int ksize, double sigma)
{
static const double pi = 3.1415926;
int center = ksize / 2; // 模板的中心位置,也就是坐標(biāo)的原點(diǎn)
double x2, y2;
for (int i = 0; i < ksize; i++)
{
x2 = pow(i - center, 2);
for (int j = 0; j < ksize; j++)
{
y2 = pow(j - center, 2);
double g = exp(-(x2 + y2) / (2 * sigma * sigma));
g /= 2 * pi * sigma;
window[i][j] = g;
}
}
double k = 1 / window[0][0]; // 將左上角的系數(shù)歸一化為1
for (int i = 0; i < ksize; i++)
{
for (int j = 0; j < ksize; j++)
{
window[i][j] *= k;
}
}
}
需要一個(gè)二維數(shù)組,存放生成的系數(shù)(這里假設(shè)模板的最大尺寸不會(huì)超過(guò)11);第二個(gè)參數(shù)是模板的大小(不要超過(guò)11);第三個(gè)參數(shù)就比較重要了,是高斯分布的標(biāo)準(zhǔn)差。
生成的過(guò)程,首先根據(jù)模板的大小,找到模板的中心位置ksize/2。然后就是遍歷,根據(jù)高斯分布的函數(shù),計(jì)算模板中每個(gè)系數(shù)的值。
需要注意的是,最后歸一化的過(guò)程,使用模板左上角的系數(shù)的倒數(shù)作為歸一化的系數(shù)(左上角的系數(shù)值被歸一化為1),模板中的每個(gè)系數(shù)都乘以該值(左上角系數(shù)的倒數(shù)),然后將得到的值取整,就得到了整數(shù)型的高斯濾波器模板。
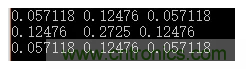
下面截圖生成的是,大小為3×3,σ=0.83×3,σ=0.8的模板
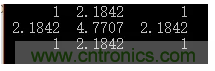
對(duì)上述解結(jié)果取整后得到如下模板:
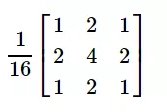
這個(gè)模板就比較熟悉了,其就是根據(jù)σ=0.8的高斯函數(shù)生成的模板。
至于小數(shù)形式的生成也比較簡(jiǎn)單,去掉歸一化的過(guò)程,并且在求解過(guò)程后,模板的每個(gè)系數(shù)要除以所有系數(shù)的和。具體代碼如下:
void generateGaussianTemplate(double window[][11], int ksize, double sigma)
{
static const double pi = 3.1415926;
int center = ksize / 2; // 模板的中心位置,也就是坐標(biāo)的原點(diǎn)
double x2, y2;
double sum = 0;
for (int i = 0; i < ksize; i++)
{
x2 = pow(i - center, 2);
for (int j = 0; j < ksize; j++)
{
y2 = pow(j - center, 2);
double g = exp(-(x2 + y2) / (2 * sigma * sigma));
g /= 2 * pi * sigma;
sum += g;
window[i][j] = g;
}
}
//double k = 1 / window[0][0]; // 將左上角的系數(shù)歸一化為1
for (int i = 0; i < ksize; i++)
{
for (int j = 0; j < ksize; j++)
{
window[i][j] /= sum;
}
}
}
3×3,σ=0.8的小數(shù)型模板。
σσ值的意義及選取
通過(guò)上述的實(shí)現(xiàn)過(guò)程,不難發(fā)現(xiàn),高斯濾波器模板的生成最重要的參數(shù)就是高斯分布的標(biāo)準(zhǔn)差σσ。標(biāo)準(zhǔn)差代表著數(shù)據(jù)的離散程度,如果σσ較小,那么生成的模板的中心系數(shù)較大,而周圍的系數(shù)較小,這樣對(duì)圖像的平滑效果就不是很明顯;反之,σσ較大,則生成的模板的各個(gè)系數(shù)相差就不是很大,比較類似均值模板,對(duì)圖像的平滑效果比較明顯。
來(lái)看下一維高斯分布的概率分布密度圖:
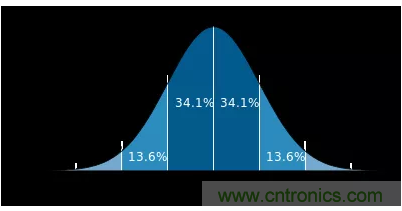
橫軸表示可能得取值x,豎軸表示概率分布密度F(x),那么不難理解這樣一個(gè)曲線與x軸圍成的圖形面積為1。σσ(標(biāo)準(zhǔn)差)決定了這個(gè)圖形的寬度,可以得出這樣的結(jié)論:σσ越大,則圖形越寬,尖峰越小,圖形較為平緩;σσ越小,則圖形越窄,越集中,中間部分也就越尖,圖形變化比較劇烈。這其實(shí)很好理解,如果sigma也就是標(biāo)準(zhǔn)差越大,則表示該密度分布一定比較分散,由于面積為1,于是尖峰部分減小,寬度越寬(分布越分散);同理,當(dāng)σσ越小時(shí),說(shuō)明密度分布較為集中,于是尖峰越尖,寬度越窄!
于是可以得到如下結(jié)論:
σσ越大,分布越分散,各部分比重差別不大,于是生成的模板各元素值差別不大,類似于平均模板;
σσ越小,分布越集中,中間部分所占比重遠(yuǎn)遠(yuǎn)高于其他部分,反映到高斯模板上就是中心元素值遠(yuǎn)遠(yuǎn)大于其他元素值,于是自然而然就相當(dāng)于中間值得點(diǎn)運(yùn)算。
基于OpenCV的實(shí)現(xiàn)
在生成高斯模板好,其簡(jiǎn)單的實(shí)現(xiàn)和其他的空間濾波器沒(méi)有區(qū)別,具體代碼如下:
void GaussianFilter(const Mat &src, Mat &dst, int ksize, double sigma)
{
CV_Assert(src.channels() || src.channels() == 3); // 只處理單通道或者三通道圖像
const static double pi = 3.1415926;
// 根據(jù)窗口大小和sigma生成高斯濾波器模板
// 申請(qǐng)一個(gè)二維數(shù)組,存放生成的高斯模板矩陣
double **templateMatrix = new double*[ksize];
for (int i = 0; i < ksize; i++)
templateMatrix[i] = new double[ksize];
int origin = ksize / 2; // 以模板的中心為原點(diǎn)
double x2, y2;
double sum = 0;
for (int i = 0; i < ksize; i++)
{
x2 = pow(i - origin, 2);
for (int j = 0; j < ksize; j++)
{
y2 = pow(j - origin, 2);
// 高斯函數(shù)前的常數(shù)可以不用計(jì)算,會(huì)在歸一化的過(guò)程中給消去
double g = exp(-(x2 + y2) / (2 * sigma * sigma));
sum += g;
templateMatrix[i][j] = g;
}
}
for (int i = 0; i < ksize; i++)
{
for (int j = 0; j < ksize; j++)
{
templateMatrix[i][j] /= sum;
cout << templateMatrix[i][j] << " ";
}
cout << endl;
}
// 將模板應(yīng)用到圖像中
int border = ksize / 2;
copyMakeBorder(src, dst, border, border, border, border, BorderTypes::BORDER_REFLECT);
int channels = dst.channels();
int rows = dst.rows - border;
int cols = dst.cols - border;
for (int i = border; i < rows; i++)
{
for (int j = border; j < cols; j++)
{
double sum[3] = { 0 };
for (int a = -border; a <= border; a++)
{
for (int b = -border; b <= border; b++)
{
if (channels == 1)
{
sum[0] += templateMatrix[border + a][border + b] * dst.at<uchar>(i + a, j + b);
}
else if (channels == 3)
{
Vec3b rgb = dst.at<Vec3b>(i + a, j + b);
auto k = templateMatrix[border + a][border + b];
sum[0] += k * rgb[0];
sum[1] += k * rgb[1];
sum[2] += k * rgb[2];
}
}
}
for (int k = 0; k < channels; k++)
{
if (sum[k] < 0)
sum[k] = 0;
else if (sum[k] > 255)
sum[k] = 255;
}
if (channels == 1)
dst.at<uchar>(i, j) = static_cast<uchar>(sum[0]);
else if (channels == 3)
{
Vec3b rgb = { static_cast<uchar>(sum[0]), static_cast<uchar>(sum[1]), static_cast<uchar>(sum[2]) };
dst.at<Vec3b>(i, j) = rgb;
}
}
}
// 釋放模板數(shù)組
for (int i = 0; i < ksize; i++)
delete[] templateMatrix[i];
delete[] templateMatrix;
}
只處理單通道或者三通道圖像,模板生成后,其濾波(卷積過(guò)程)就比較簡(jiǎn)單了。不過(guò),這樣的高斯濾波過(guò)程,其循環(huán)運(yùn)算次數(shù)為m×n×ksize2,其中m,n為圖像的尺寸;ksize為高斯濾波器的尺寸。這樣其時(shí)間復(fù)雜度為O(ksize2),隨濾波器的模板的尺寸呈平方增長(zhǎng),當(dāng)高斯濾波器的尺寸較大時(shí),其運(yùn)算效率是極低的。為了,提高濾波的運(yùn)算速度,可以將二維的高斯濾波過(guò)程分解開(kāi)來(lái)。
分離實(shí)現(xiàn)高斯濾波
由于高斯函數(shù)的可分離性,尺寸較大的高斯濾波器可以分成兩步進(jìn)行:首先將圖像在水平(豎直)方向與一維高斯函數(shù)進(jìn)行卷積;然后將卷積后的結(jié)果在豎直(水平)方向使用相同的一維高斯函數(shù)得到的模板進(jìn)行卷積運(yùn)算。具體實(shí)現(xiàn)代碼如下:
// 分離的計(jì)算
void separateGaussianFilter(const Mat &src, Mat &dst, int ksize, double sigma)
{
CV_Assert(src.channels()==1 || src.channels() == 3); // 只處理單通道或者三通道圖像
// 生成一維的高斯濾波模板
double *matrix = new double[ksize];
double sum = 0;
int origin = ksize / 2;
for (int i = 0; i < ksize; i++)
{
// 高斯函數(shù)前的常數(shù)可以不用計(jì)算,會(huì)在歸一化的過(guò)程中給消去
double g = exp(-(i - origin) * (i - origin) / (2 * sigma * sigma));
sum += g;
matrix[i] = g;
}
// 歸一化
for (int i = 0; i < ksize; i++)
matrix[i] /= sum;
// 將模板應(yīng)用到圖像中
int border = ksize / 2;
copyMakeBorder(src, dst, border, border, border, border, BorderTypes::BORDER_REFLECT);
int channels = dst.channels();
int rows = dst.rows - border;
int cols = dst.cols - border;
// 水平方向
for (int i = border; i < rows; i++)
{
for (int j = border; j < cols; j++)
{
double sum[3] = { 0 };
for (int k = -border; k <= border; k++)
{
if (channels == 1)
{
sum[0] += matrix[border + k] * dst.at<uchar>(i, j + k); // 行不變,列變化;先做水平方向的卷積
}
else if (channels == 3)
{
Vec3b rgb = dst.at<Vec3b>(i, j + k);
sum[0] += matrix[border + k] * rgb[0];
sum[1] += matrix[border + k] * rgb[1];
sum[2] += matrix[border + k] * rgb[2];
}
}
for (int k = 0; k < channels; k++)
{
if (sum[k] < 0)
sum[k] = 0;
else if (sum[k] > 255)
sum[k] = 255;
}
if (channels == 1)
dst.at<uchar>(i, j) = static_cast<uchar>(sum[0]);
else if (channels == 3)
{
Vec3b rgb = { static_cast<uchar>(sum[0]), static_cast<uchar>(sum[1]), static_cast<uchar>(sum[2]) };
dst.at<Vec3b>(i, j) = rgb;
}
}
}
// 豎直方向
for (int i = border; i < rows; i++)
{
for (int j = border; j < cols; j++)
{
double sum[3] = { 0 };
for (int k = -border; k <= border; k++)
{
if (channels == 1)
{
sum[0] += matrix[border + k] * dst.at<uchar>(i + k, j); // 列不變,行變化;豎直方向的卷積
}
else if (channels == 3)
{
Vec3b rgb = dst.at<Vec3b>(i + k, j);
sum[0] += matrix[border + k] * rgb[0];
sum[1] += matrix[border + k] * rgb[1];
sum[2] += matrix[border + k] * rgb[2];
}
}
for (int k = 0; k < channels; k++)
{
if (sum[k] < 0)
sum[k] = 0;
else if (sum[k] > 255)
sum[k] = 255;
}
if (channels == 1)
dst.at<uchar>(i, j) = static_cast<uchar>(sum[0]);
else if (channels == 3)
{
Vec3b rgb = { static_cast<uchar>(sum[0]), static_cast<uchar>(sum[1]), static_cast<uchar>(sum[2]) };
dst.at<Vec3b>(i, j) = rgb;
}
}
}
delete[] matrix;
}
代碼沒(méi)有重構(gòu)較長(zhǎng),不過(guò)其實(shí)現(xiàn)原理是比較簡(jiǎn)單的。首先得到一維高斯函數(shù)的模板,在卷積(濾波)的過(guò)程中,保持行不變,列變化,在水平方向上做卷積運(yùn)算;接著在上述得到的結(jié)果上,保持列不邊,行變化,在豎直方向上做卷積運(yùn)算。這樣分解開(kāi)來(lái),算法的時(shí)間復(fù)雜度為O(ksize)O(ksize),運(yùn)算量和濾波器的模板尺寸呈線性增長(zhǎng)。
在OpenCV也有對(duì)高斯濾波器的封裝GaussianBlur,其聲明如下:
CV_EXPORTS_W void GaussianBlur( InputArray src, OutputArray dst, Size ksize,
double sigmaX, double sigmaY = 0,
int borderType = BORDER_DEFAULT );
二維高斯函數(shù)的標(biāo)準(zhǔn)差在x和y方向上應(yīng)該分別有一個(gè)標(biāo)準(zhǔn)差,在上面的代碼中一直設(shè)其在x和y方向的標(biāo)準(zhǔn)是相等的,在OpenCV中的高斯濾波器中,可以在x和y方向上設(shè)置不同的標(biāo)準(zhǔn)差。
下圖是自己實(shí)現(xiàn)的高斯濾波器和OpenCV中的GaussianBlur的結(jié)果對(duì)比

上圖是5×5,σ=0.8的高斯濾波器,可以看出兩個(gè)實(shí)現(xiàn)得到的結(jié)果沒(méi)有很大的區(qū)別。
總結(jié)
高斯濾波器是一種線性平滑濾波器,其濾波器的模板是對(duì)二維高斯函數(shù)離散得到。由于高斯模板的中心值最大,四周逐漸減小,其濾波后的結(jié)果相對(duì)于均值濾波器來(lái)說(shuō)更好。
高斯濾波器最重要的參數(shù)就是高斯分布的標(biāo)準(zhǔn)差σσ,標(biāo)準(zhǔn)差和高斯濾波器的平滑能力有很大的能力,σσ越大,高斯濾波器的頻帶就較寬,對(duì)圖像的平滑程度就越好。通過(guò)調(diào)節(jié)σσ參數(shù),可以平衡對(duì)圖像的噪聲的抑制和對(duì)圖像的模糊。



