
【導(dǎo)讀】本文介紹如何使用降階隆伯格觀(guān)測(cè)器(ROLO)估算永磁同步電機(jī)(PMSM)的轉(zhuǎn) 子磁鏈位置。首先介紹特征值與穩(wěn)定性的關(guān)系;在此基礎(chǔ)上,引入狀態(tài)反饋控制 的理念;接著介紹如何使用該理念來(lái)設(shè)計(jì)隆伯格觀(guān)測(cè)器;然后,以 PMSM 為例, 推導(dǎo) ROLO 的設(shè)計(jì)過(guò)程,給出設(shè)計(jì)結(jié)果;最后,介紹 Microchip 的相關(guān)電機(jī)控制方 案(評(píng)估套件、例程和文檔等)。
摘要
本文介紹如何使用降階隆伯格觀(guān)測(cè)器(ROLO)估算永磁同步電機(jī)(PMSM)的轉(zhuǎn)子磁鏈位置。首先介紹特征值與穩(wěn)定性的關(guān)系;在此基礎(chǔ)上,引入狀態(tài)反饋控制的理念;接著介紹如何使用該理念來(lái)設(shè)計(jì)隆伯格觀(guān)測(cè)器;然后,以 PMSM 為例,推導(dǎo) ROLO 的設(shè)計(jì)過(guò)程,給出設(shè)計(jì)結(jié)果;最后,介紹 Microchip 的相關(guān)電機(jī)控制方案(評(píng)估套件、例程和文檔等)。
一、 概述
永磁同步電機(jī)(PMSM)的磁場(chǎng)定向控制(FOC)在近十幾年成為了主流的電機(jī)控制方法。其中,無(wú)位置傳感器 FOC 由于其低成本和高可靠性,獲得了越來(lái)越多的應(yīng)用和關(guān)注。由于沒(méi)有位置傳感器,所以必須估算轉(zhuǎn)子磁鏈位置。由于在旋轉(zhuǎn)過(guò)程中,轉(zhuǎn)子磁鏈生成反電動(dòng)勢(shì)(BEMF),并且 BEMF 超前轉(zhuǎn)子磁鏈 弧度,所以
可以利用對(duì) BEMF 進(jìn)行觀(guān)測(cè),進(jìn)而估算轉(zhuǎn)子磁鏈。降階隆伯格觀(guān)測(cè)器(ROLO)是一種常用的 BEMF 觀(guān)測(cè)手段。
一方面,工程師可能不具備設(shè)計(jì)觀(guān)測(cè)器所需的背景知識(shí);另一方面,產(chǎn)品開(kāi)發(fā)項(xiàng)目必須盡快且高質(zhì)量地完成。盡管可以找到背景知識(shí)的相關(guān)教材,但由于其缺少針對(duì)性,所以工程師不得不花費(fèi)大量時(shí)間進(jìn)行學(xué)習(xí)。該矛盾經(jīng)常成為制約產(chǎn)品開(kāi)發(fā)進(jìn)度和質(zhì)量的瓶頸。針對(duì)此困境,ROLO 由于其原理簡(jiǎn)單,成為了能短時(shí)間掌握的優(yōu)選方案。
本文針對(duì) PMSM 控制所需,篩選出最少量的必需知識(shí),按照邏輯順序闡述利用ROLO 觀(guān)測(cè) BEMF 的原理。此外,還介紹了 Microchip 的相關(guān)電機(jī)控制方案。讀者可以借此快速掌握原理,并且上手實(shí)踐和熟悉。
二、 特征值與穩(wěn)定性
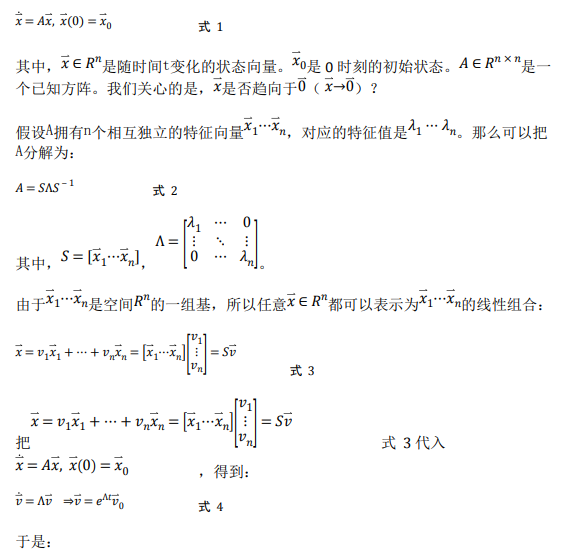
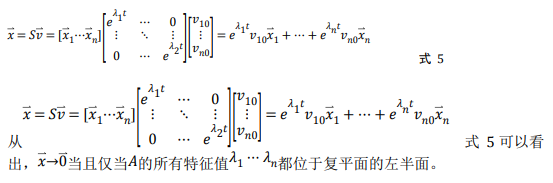
常微分方程(ODE)是時(shí)間確定性系統(tǒng)的一種抽象模型。PMSM 可以看作是一個(gè)線(xiàn)性時(shí)間確定性系統(tǒng),因此可以用線(xiàn)性常微分方程來(lái)建模。
考慮以下的一般線(xiàn)性 ODE:
考慮以下的一般線(xiàn)性 ODE:
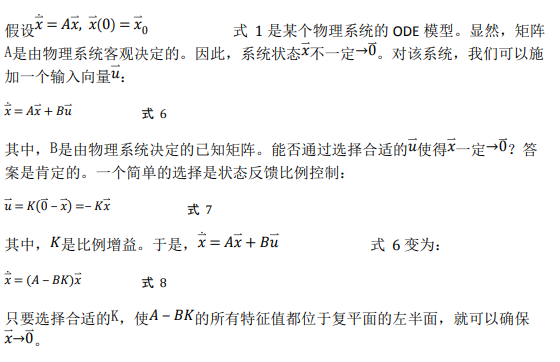
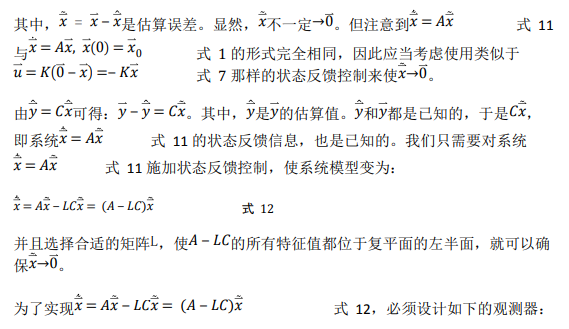
三、 狀態(tài)反饋控制
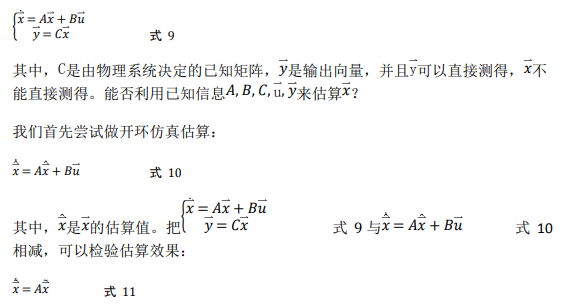
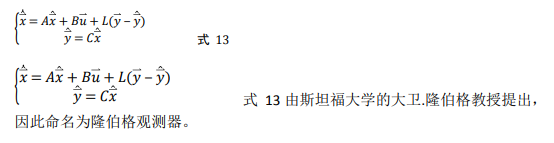
四、 隆伯格觀(guān)測(cè)器
考慮以下系統(tǒng):
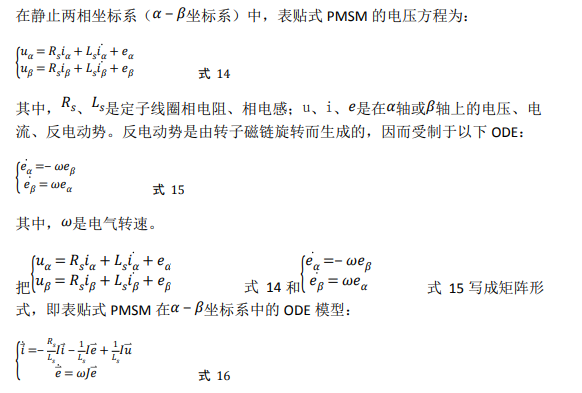
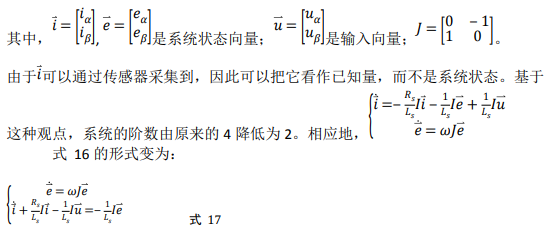
五、 觀(guān)測(cè) PMSM 的 BEMF
六、 Microchip 的 ROLO 方案
Microchip 的基于 ROLO 的 PMSM 無(wú)傳感器控制方案提供例程、評(píng)估套件、開(kāi)發(fā)工具和幫助文檔。
例程位于 MPLAB® Harmony 3 的 motor control 模塊中,是一個(gè)運(yùn)行在 Cortex®-M0+MCU(SAMC21)之上的 MPLAB X 工程:pmsm_foc_rolo_sam_c21。
該演示方案可以運(yùn)行于 MCLV2 低壓電機(jī)控制評(píng)估套件或 MCHV3 高壓電機(jī)控制評(píng)估套件。兩款評(píng)估套件均可在 Microchip 官網(wǎng)搜索并訂購(gòu)。
該例程利用圖形化配置工具 MPLAB Harmony 配置器(MHC)生成。使用 MPLAB XIDE 打開(kāi)該工程,并打開(kāi) MHC,就可以看到 CPU 和所需片上周邊(PWM 模塊和ADC 等)的配置情況,如< 圖 1. 例程的 MHC 配置 >所示。
相應(yīng)的幫助文檔也位于 MPLAB Harmony 3 的 motor control 模塊中。其中介紹了如何搭建硬件平臺(tái)、編譯和下載工程、算法原理框圖、軟件流程圖、軟件配置方法等,如< 圖 2. 電機(jī)控制算法框圖 >、< 圖 3. 軟件流程圖 >、< 圖 4. 軟件配置方法:電機(jī)參數(shù)宏定義列表 >和< 圖 5. 低壓電機(jī)控制硬件連接 >所示。
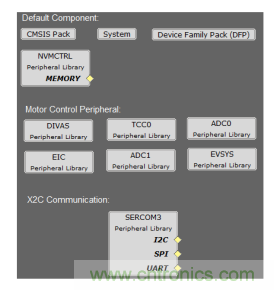
< 圖 1. 例程的 MHC 配置 >
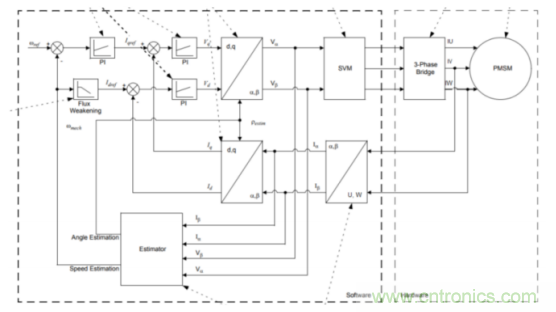
< 圖 2. 電機(jī)控制算法框圖 >

< 圖 3. 軟件流程圖 >
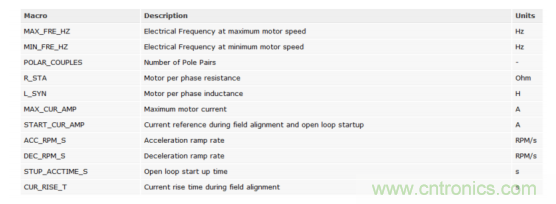
< 圖 4. 軟件配置方法:電機(jī)參數(shù)宏定義列表 >
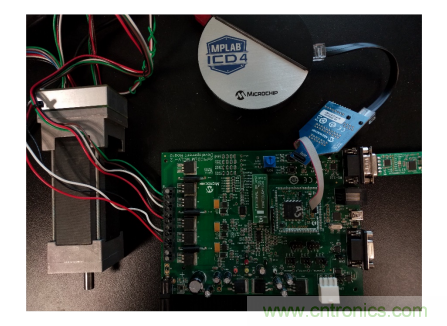
< 圖 5. 低壓電機(jī)控制硬件連接 >
七、 總結(jié)
本文從 PMSM 的 ODE 模型開(kāi)始,逐步介紹了基于 ROLO 的 BEMF 觀(guān)測(cè)器的設(shè)計(jì)理念和方法;并且介紹了 Microchip 的相關(guān)方案。讀者可以利用這些資源快速掌握原理并上手實(shí)踐、熟悉 PMSM 的無(wú)傳感器控制方法,以加快項(xiàng)目開(kāi)發(fā)進(jìn)度和提升產(chǎn)品性能。
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問(wèn)題,請(qǐng)電話(huà)或者郵箱聯(lián)系小編進(jìn)行侵刪。



