
【導(dǎo)讀】在今天的數(shù)據(jù)采集系統(tǒng)(DAQ)中,需要不斷突破性能極限。系統(tǒng)設(shè)計人員需要更高的速度、更低的噪聲和更優(yōu)的總諧波失真(THD)性能,所有這些都有可能實(shí)現(xiàn),但卻并非免費(fèi)。實(shí)現(xiàn)這些性能改進(jìn)通常需要更大的工作電流,而更大的工作電流則會產(chǎn)生更高的功耗。但是,在許多應(yīng)用中,功耗敏感性也越來越受關(guān)注。原因有很多種??赡苁怯捎趹?yīng)用是一種利用紐扣電池進(jìn)行工作的遠(yuǎn)程系統(tǒng),其主要關(guān)注點(diǎn)是電池壽命。也可能是由于應(yīng)用是一種多通道系統(tǒng),其通道數(shù)較多、電路密度較高,會造成熱量集中,從而產(chǎn)生由溫度引起的漂移問題。無論何種情況,最大限度降低電流消耗和功耗都是重中之重。系統(tǒng)設(shè)計人員必須權(quán)衡更高性能和更低功耗帶來的競爭優(yōu)勢。解決此問題的一種途徑是借助一個稱為動態(tài)功耗調(diào)節(jié)(DPS)的過程。
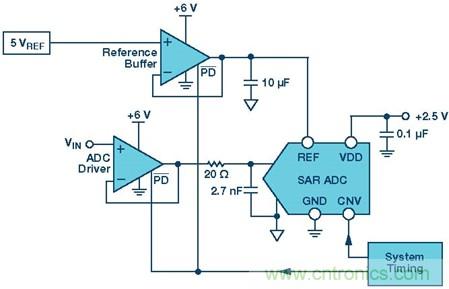
圖1.基于SAR型ADC的數(shù)據(jù)采集子系統(tǒng)的框圖
簡單而言,DPS就是一個在需要時啟用電子元件、在不需要時禁用電子元件的動態(tài)過程。圖1所示為一個典型的基于SAR型ADC的數(shù)據(jù)采集子系統(tǒng)。SAR型ADC的一個主要屬性是其功耗隨吞吐速率而變化,這使其非常適合功耗敏感型應(yīng)用。以往,ADC驅(qū)動器和基準(zhǔn)電壓源緩沖器不能與SAR一樣享有自動功耗調(diào)節(jié)功能。它們通常會在系統(tǒng)運(yùn)行時上電并啟用,這樣會消耗過多的電能。假設(shè)啟用時間足夠短,便可以動態(tài)方式驅(qū)動放大器關(guān)斷引腳,從而禁用ADC轉(zhuǎn)換之間的放大器。這就是動態(tài)功耗調(diào)節(jié)。通過對放大器運(yùn)用DPS,可大幅降低其平均電流消耗。借助DPS,放大器靜態(tài)電流隨關(guān)斷引腳正在被驅(qū)動的負(fù)載周期而變化。理論平均靜態(tài)電流可由下式得出
其中:
● IAVG為平均DPS靜態(tài)電流
● IQ_ON為已啟用的放大器的靜態(tài)電流
● IQ_OFF為已禁用的放大器的靜態(tài)電流
● tON為啟用放大器的時間
● tS為采樣頻率周期
本文的其余部分將聚焦于ADC驅(qū)動器放大器,但DPS概念也可運(yùn)用至基準(zhǔn)電壓源緩沖器,而且得到的結(jié)果類似。
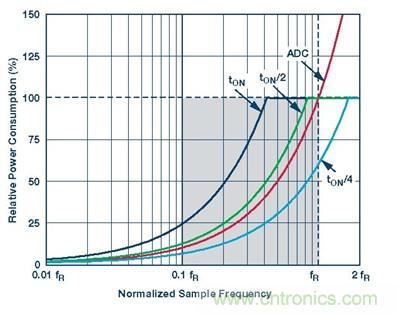
圖2.在選定tON(與一直啟用的放大器相關(guān))時進(jìn)行DPS的理論放大器功耗
動態(tài)功耗調(diào)節(jié)介紹
圖2顯示了ADC驅(qū)動器放大器在一直啟用時的理論效率提升。fR處的豎直基準(zhǔn)線代表ADC功耗等于一直啟用的驅(qū)動器放大器的功耗時的采樣頻率。采樣速率較低時,放大器的功耗占主導(dǎo),采樣速率較高時,ADC的功耗占主導(dǎo)?;鶞?zhǔn)頻率(fR)將隨放大器和選定ADC的功耗而變化,但基本概念依然相同。進(jìn)行功耗調(diào)節(jié)的同一放大器的相對效率提升以三種不同的tON值顯示。不出所料,采樣速率給定時,更小的tON會產(chǎn)生更高的效率,并且能夠以更高的采樣速率運(yùn)用DPS。陰影區(qū)域表明,逐漸減小tON產(chǎn)生的最大提升區(qū)域一般會延伸至約10個fR以下。由于采樣速率會繼續(xù)降至此點(diǎn)以下,因此可實(shí)現(xiàn)最大的整體功耗節(jié)約,但進(jìn)一步減小tON帶來的優(yōu)勢可以忽略不計,因?yàn)楣闹饾u接近關(guān)斷或禁用狀態(tài)的功耗。
要利用DPS獲得最高的性能,系統(tǒng)時序和確定最小tON至關(guān)重要。
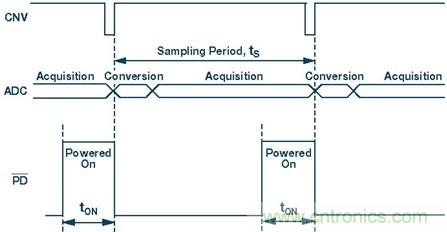
圖3.放大器和ADC控制信號的簡化時序圖
圖3所示為ADC和驅(qū)動器放大器的簡化時序圖。圖1中的系統(tǒng)時序功能塊(FPGA、DSP和微控制器)可提供恰當(dāng)?shù)亩〞rADC轉(zhuǎn)換開始(CNV)和放大器關(guān)斷(PD)信號。SAR型ADC會在CNV的上升沿啟動轉(zhuǎn)換。在CNV的上升沿前,放大器在ADC采集階段上電一段時間(tON),然后與CNV的上升沿同步關(guān)斷。tON的值為多大才恰當(dāng)?
雖然圖2說明了使用隨機(jī)的tON值時的概念,但其清楚表明,DPS的全部價值將僅在使用最小tON時實(shí)現(xiàn)。這是放大器必須在ADC轉(zhuǎn)換開始前啟用以確保結(jié)果準(zhǔn)確的最短時間。更短的時間將導(dǎo)致SNR或THD降低,更長的時間將不會引起任何性能提升。實(shí)際上最小tON在整個采樣速率范圍內(nèi)并非固定,并且必須根據(jù)具體應(yīng)用,用經(jīng)驗(yàn)進(jìn)行確定。最小tON因不同的放大器和系統(tǒng)而異。例如,如果在圖1的電路中使用ADA4805-1和AD7980的放大器/ADC組合,則最小tON會隨著采樣速率的增大而減小。通常,1 kSPS時需要~4 μs,而1 MSPS時則只需要~600 ns。采樣速率較低時,由于處于關(guān)斷狀態(tài)的時間延長,因而較長的一段時間會為內(nèi)部放大器節(jié)點(diǎn)放電提供更多的時間,因而開啟時間更長。相反地,采樣速率更高時,此時間段更短,因而內(nèi)部放電時間更短。事實(shí)上,隨著采樣速率提高,有限的放大器關(guān)斷時間將變得長于在關(guān)斷狀態(tài)消耗的時間。實(shí)際上,放大器在完成關(guān)斷過程前就已經(jīng)重新開啟。這看起來是人為式的快速開啟時間,但在性能數(shù)據(jù)未減小時卻十分有效。
預(yù)測潛在功耗節(jié)省量時需要考慮的最后一點(diǎn)是輸入信號頻率的影響。迄今為止,我們已通過使用給定放大器的計算靜態(tài)電流對DPS的概念進(jìn)行說明。將一個信號施加在放大器輸入時,也會出現(xiàn)隨輸入信號頻率增大而增大的動態(tài)電流。如果輸入頻率足夠低,影響微乎其微。隨著頻率增大,放大器輸出端的RC網(wǎng)絡(luò)會顯示更大的負(fù)載,因而需要放大器提供更大的電流來處理此信號。
使用前面提及的ADA4805-1和AD7980并將這些概念綜合在一起便可得到圖4中的曲線。此圖顯示了進(jìn)行動態(tài)功耗調(diào)節(jié)的ADC驅(qū)動器放大器相對于同樣的放大器在一直啟用時的功耗(用百分比表示)。我們繪制了選定輸入頻率下的DPS效率圖,用以描述更高的輸入頻率對功耗的影響。我們確定了介于1 kSPS至1 MSPS之間的多個采樣速率的最小tON,并將其定義為導(dǎo)致SINAD(信噪失真比)與一直啟用的放大器相比減小不超過0.5 dB的tON。此圖顯示,在低采樣速率下處理緩慢輸入信號時,功耗節(jié)省量最高可達(dá)95%。但對更高吞吐量的系統(tǒng)而言更重要的是,潛在功耗節(jié)省量仍然非常高,在100 kSPS時最高可達(dá)65%,在1 MSPS時最高可達(dá)35%。必須注意,圖4反映的是一個單位增益緩沖器在持續(xù)被采樣的系統(tǒng)中的性能。但是,如之前所述,可將這些DPS概念輕松運(yùn)用至基準(zhǔn)電壓源緩沖器,而且得到的結(jié)果類似。
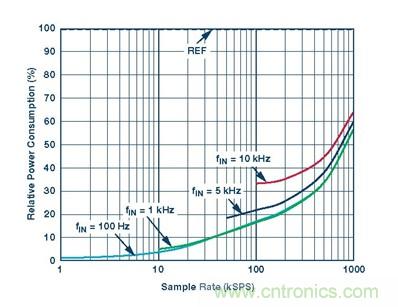
圖4.放大器功耗與動態(tài)功耗調(diào)節(jié)的關(guān)系—試驗(yàn)結(jié)果
雖然DPS是一種相對較新的概念,而且需要考慮設(shè)計和時序因素,但是其初步成果非常有效。很明顯,對更高性能和更低功耗的渴望將延續(xù)到未來,從而進(jìn)一步增加對創(chuàng)意低功耗解決方案的需求。
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進(jìn)行處理。
推薦閱讀:




