

【導(dǎo)讀】根據(jù)三角測(cè)量原理,配合發(fā)射出的激光束和接收器陣列,傳感器可采集多達(dá)600條距離信息,然后計(jì)算出被測(cè)物體的距離。
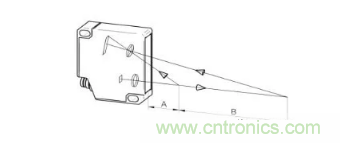
三角測(cè)量法
根據(jù)三角測(cè)量原理,通過(guò)測(cè)量反射光的入射角,可計(jì)算出傳感器到物體的距離。入射角隨距離而變化,因而激光點(diǎn)在接收器上的位置也相應(yīng)變化。
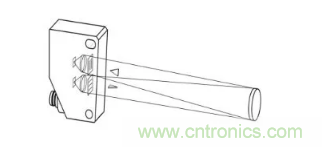
飛行時(shí)間法
飛行時(shí)間法(即傳播時(shí)間測(cè)量)是一種間接測(cè)距法,即通過(guò)測(cè)量發(fā)射信號(hào)從被測(cè)物體返回的時(shí)間間隔來(lái)完成距離測(cè)量。
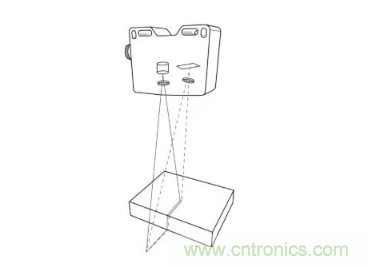
光切法
根據(jù)三角測(cè)量原理,配合發(fā)射出的激光束和接收器陣列,傳感器可采集多達(dá)600條距離信息,然后計(jì)算出被測(cè)物體的距離。
點(diǎn)激光可用于測(cè)量尺寸極小的物體
精準(zhǔn)聚焦,光斑直徑不超過(guò)0.4 mm,能精確測(cè)量小尺寸物體
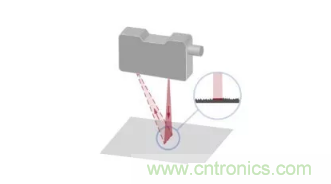
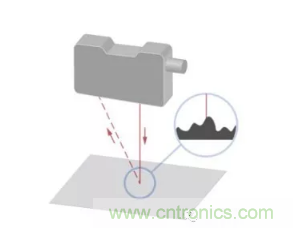
線激光適用于測(cè)量粗糙或帶紋理的彩色表面
超細(xì)線激光,寬度小于10 mm,能可靠測(cè)量粗糙表面以及帶紋理的彩色表面
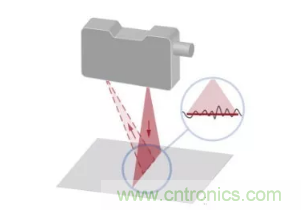
多點(diǎn)激光測(cè)距傳感器 – 適用于難測(cè)表面
72 mm超寬線激光,每次可記錄600多個(gè)測(cè)量值,在光澤不均勻或極其粗糙的表面上也能進(jìn)行穩(wěn)定的測(cè)量。
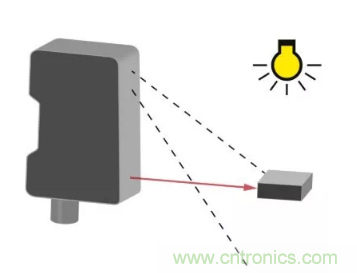
抗環(huán)境光干擾能力
憑借強(qiáng)大的內(nèi)置評(píng)估算法,激光測(cè)距傳感器具有極強(qiáng)的抗外部光線干擾能力, 從而確保穩(wěn)定可靠地運(yùn)行。
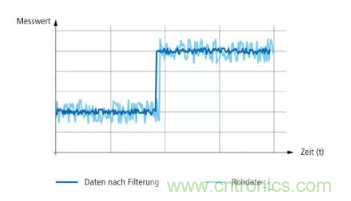
過(guò)濾功能可調(diào)
啟動(dòng)過(guò)濾功能可減小輸出信號(hào)的噪音,從而提高分辨率。
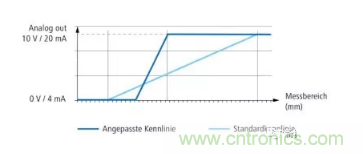
測(cè)量范圍可調(diào)
用戶可通過(guò)自學(xué)習(xí)按鈕、自學(xué)習(xí)線或者顯示屏,在最大測(cè)量范圍內(nèi)調(diào)節(jié)具體的測(cè)量范圍。

