
【導(dǎo)讀】振動是生活中常見的一種機械運動形式,包括樹枝晃動、橋梁振動、海浪運動等,它蘊含著豐富的機械能可以轉(zhuǎn)化為電能輸出,為廣泛分布的小型電子設(shè)備或傳感器供電。
摩擦式能量采集器和電磁式能量采集器因其各自的材料優(yōu)勢和輸出特點在振動機械能采集方面具有廣泛的應(yīng)用。然而生活中的振動多具有隨機無序、方向多變的特點,采集某一特定方向的機械能會使器件沿其他方向振動時效率大大降低,因此,開發(fā)一款可有效采集多個方向振動機械能的能量采集器在建立自供能系統(tǒng)方面具有重要意義。
近日,北京大學(xué)信息科學(xué)技術(shù)學(xué)院微納電子學(xué)研究院張海霞教授課題組提出了一種可采集平面內(nèi)任意方向振動機械能的電磁摩擦復(fù)合式能量采集器。相關(guān)研究成果以“Hybrid generator based on freestanding magnet as all-direction in-plane energy harvester and vibration sensor”為題,發(fā)表于納米科學(xué)技術(shù)領(lǐng)域重要期刊Nano Energy上,博士研究生陳學(xué)先為論文第一作者。該復(fù)合式能量采集器采用彈簧固定的懸浮磁體作為滑塊,并利用FPCB工藝制作了薄膜式具有八瓣結(jié)構(gòu)的摩擦發(fā)電機電極和電磁線圈,其中任意相對的兩個電極構(gòu)成一個freestanding結(jié)構(gòu)的摩擦發(fā)電機,因此使器件沿任意方向滑動時均可同時產(chǎn)生電磁和摩擦信號輸出,提高機械能利用效率。此外,彈簧和磁體構(gòu)成面內(nèi)諧振系統(tǒng),使器件在10Hz的低頻振動范圍內(nèi)均可有效的產(chǎn)生電信號輸出。得益于電磁發(fā)電機輸出電流大和摩擦發(fā)電機輸出電壓高的特點,在復(fù)合充電條件下,器件可在200s內(nèi)快速將20μF電容充電至7V。通過將器件固定到人體小腿或者自行車車輪上,該復(fù)合式能量采集器可有效采集人體跑步時或自行車剎車時機械能并點亮40個LED,因此可作為自供能夜跑燈或自行車剎車燈的能量采集裝置。此外,通過對4個freestanding結(jié)構(gòu)摩擦發(fā)電機上的輸出信號的進一步分析,器件還可做為主動式方向傳感器,對正弦式或脈沖式振動的方向進行識別,在環(huán)境監(jiān)測、自驅(qū)動傳感系統(tǒng)和人機交互等領(lǐng)域有廣泛的應(yīng)用前景。
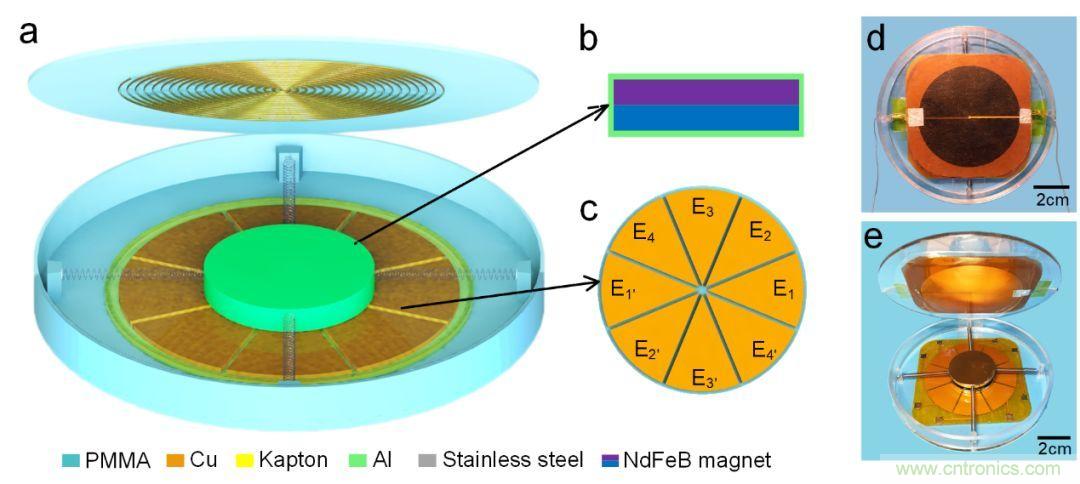
圖一:電磁摩擦復(fù)合發(fā)電機結(jié)構(gòu)概覽
(a) 器件結(jié)構(gòu)示意圖;
(b) 滑塊內(nèi)部結(jié)構(gòu)示意圖;
(c) 摩擦發(fā)電機八瓣電極結(jié)構(gòu);
(d) 器件結(jié)構(gòu)照片;
(e) 器件內(nèi)部結(jié)構(gòu)照片。
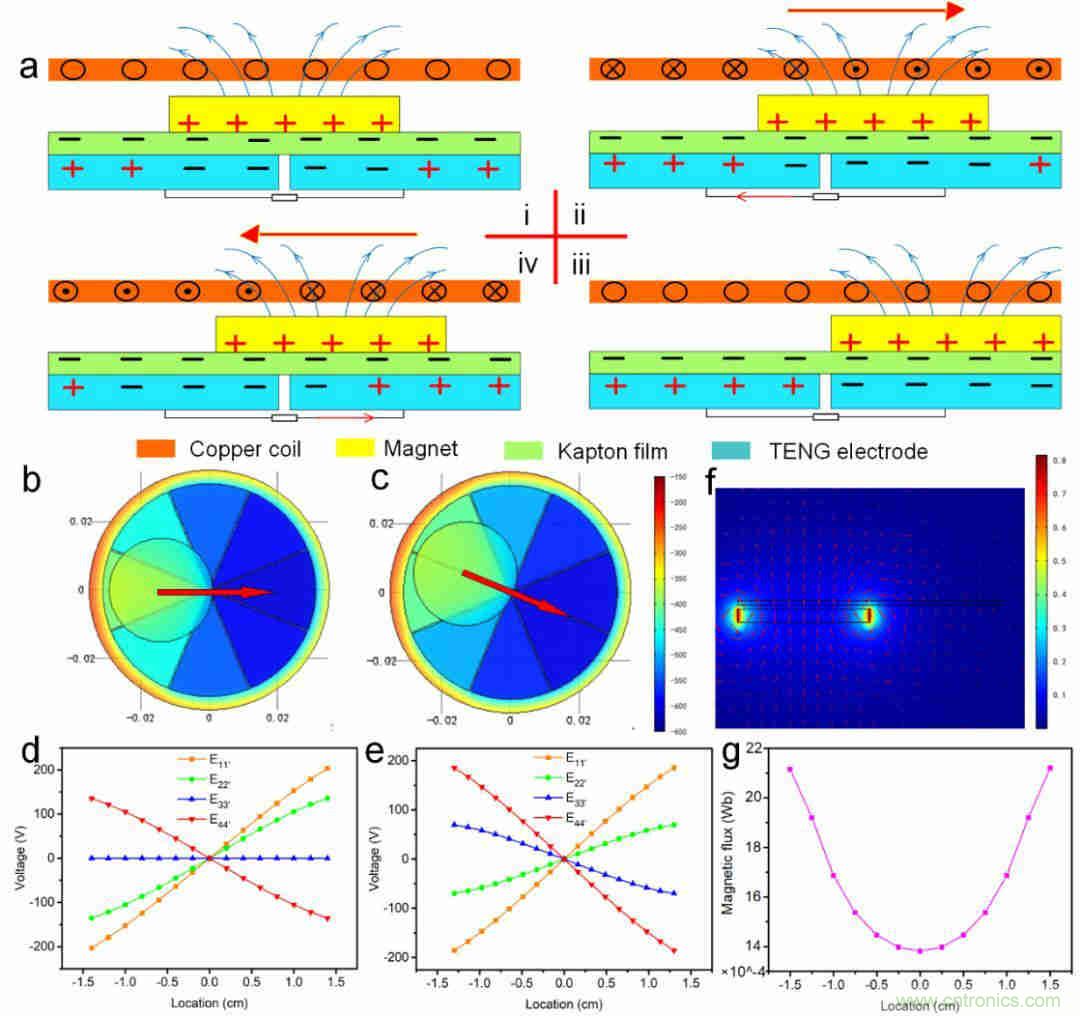
圖二:復(fù)合發(fā)電機工作原理及仿真分析
(a) 器件工作原理;
(b,c)器件沿11’方向和11’、44’之間方向滑動時摩擦電極上仿真電勢分布;
(d,e)器件沿11’方向和11’、44’之間方向滑動時四個freestanding結(jié)構(gòu)摩擦發(fā)電機的輸出;
(f)電磁發(fā)電機的仿真磁場強度分布;
(g)當磁體從器件一端滑向另一端時電磁線圈中的磁通量變化。
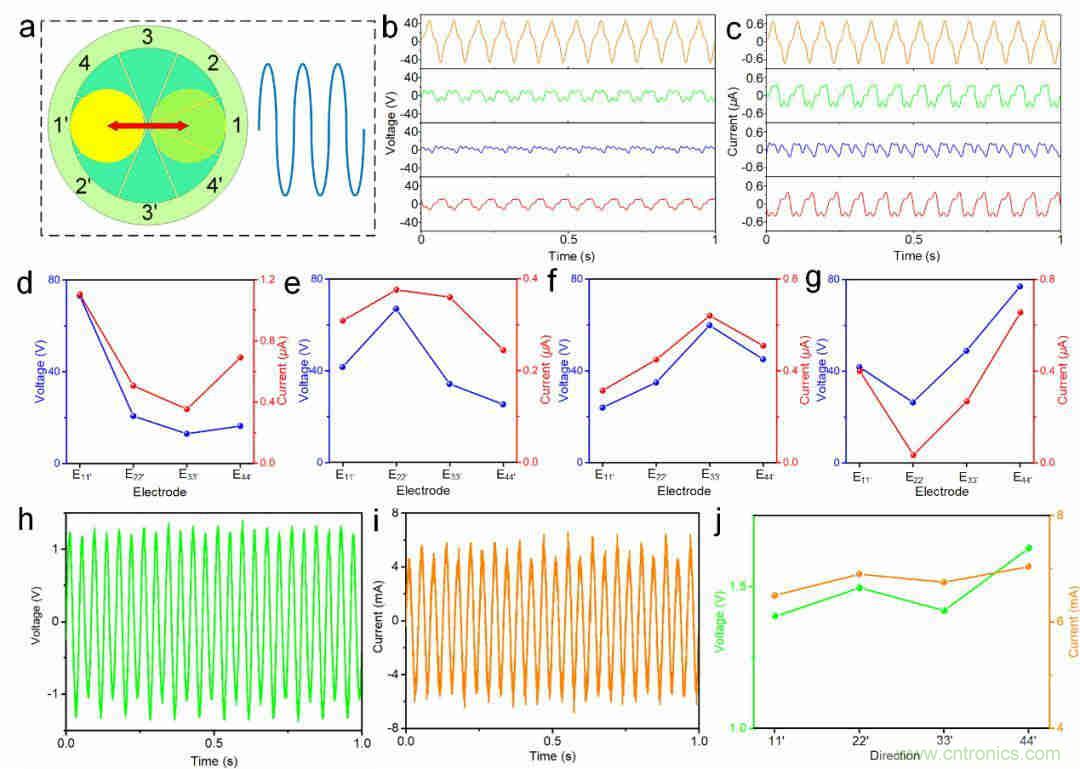
圖三:復(fù)合發(fā)電機在正弦信號激勵下的輸出性能
(a) 正弦信號激勵下滑塊運動示意圖;
(b,c) E11’摩擦發(fā)電機在正弦信號激勵下的電壓和電流輸出;
(d-g) 四個摩擦發(fā)電機在器件沿四個方向振動時的輸出對比;
(h,i) 電磁發(fā)電機在在正弦信號激勵下的電壓和電流輸出;
(j) 電磁發(fā)電機在器件沿四個方向振動時的輸出對比。
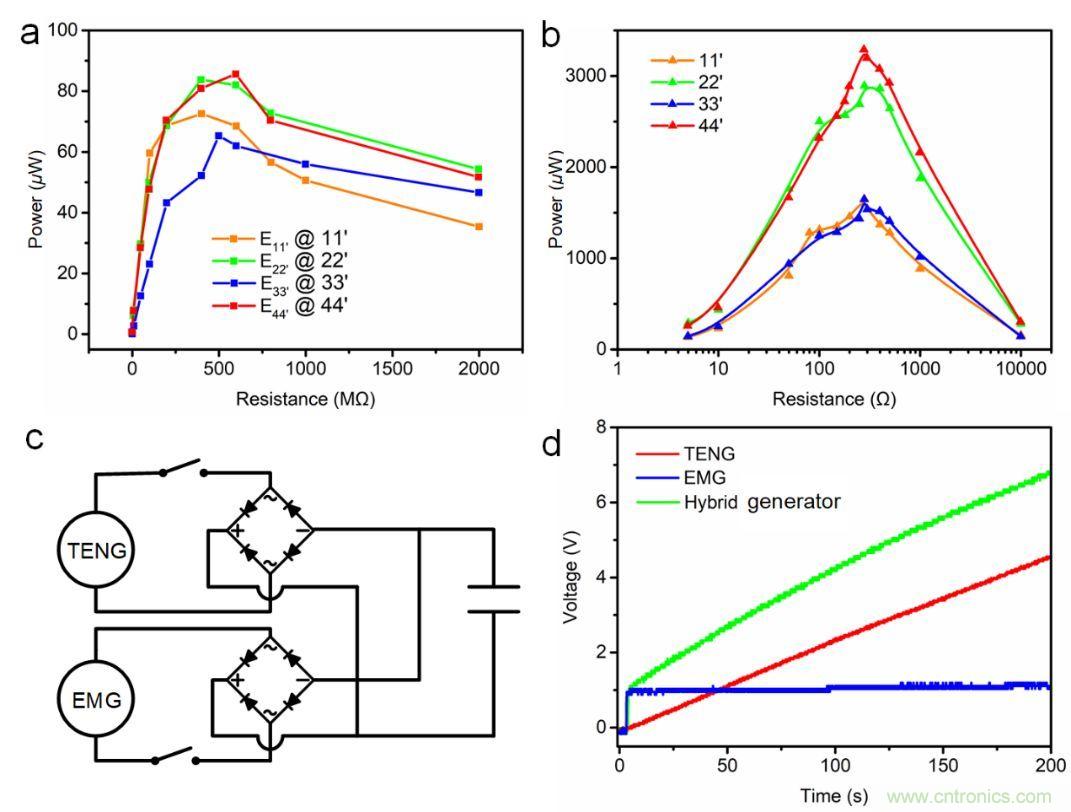
圖四:復(fù)合式發(fā)電機的輸出功率及充電能力
(a-b) 摩擦發(fā)電部分和電磁發(fā)電部分在不同負載下的輸出功率;
(c-d) 復(fù)合發(fā)電機為電容充電時的電路框圖和充電曲線。
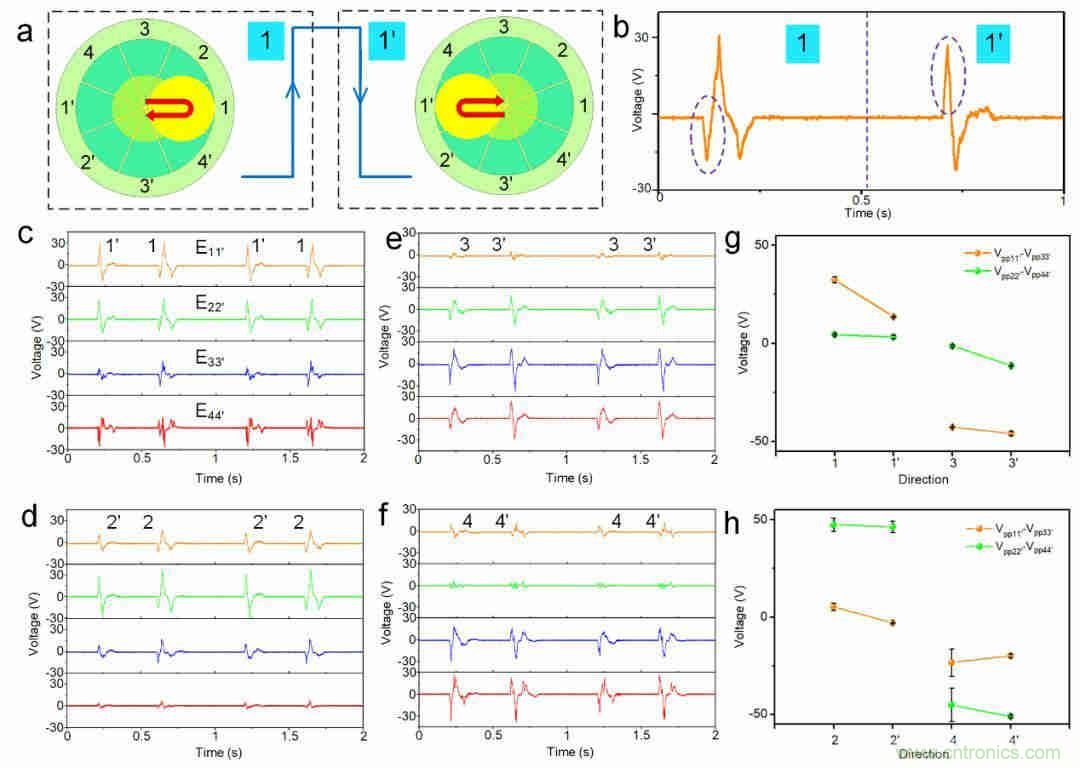
圖五:復(fù)合式發(fā)電機對脈沖振動信號的方向識別
(a)脈沖振動下滑塊的運動示意圖;
(b)11’方向的脈沖振動下E11’電極的輸出信號;
(c-f)器件沿8個方向振動時四個摩擦發(fā)電機的輸出信號;
(g,h)差值法對振動方向進行判斷。
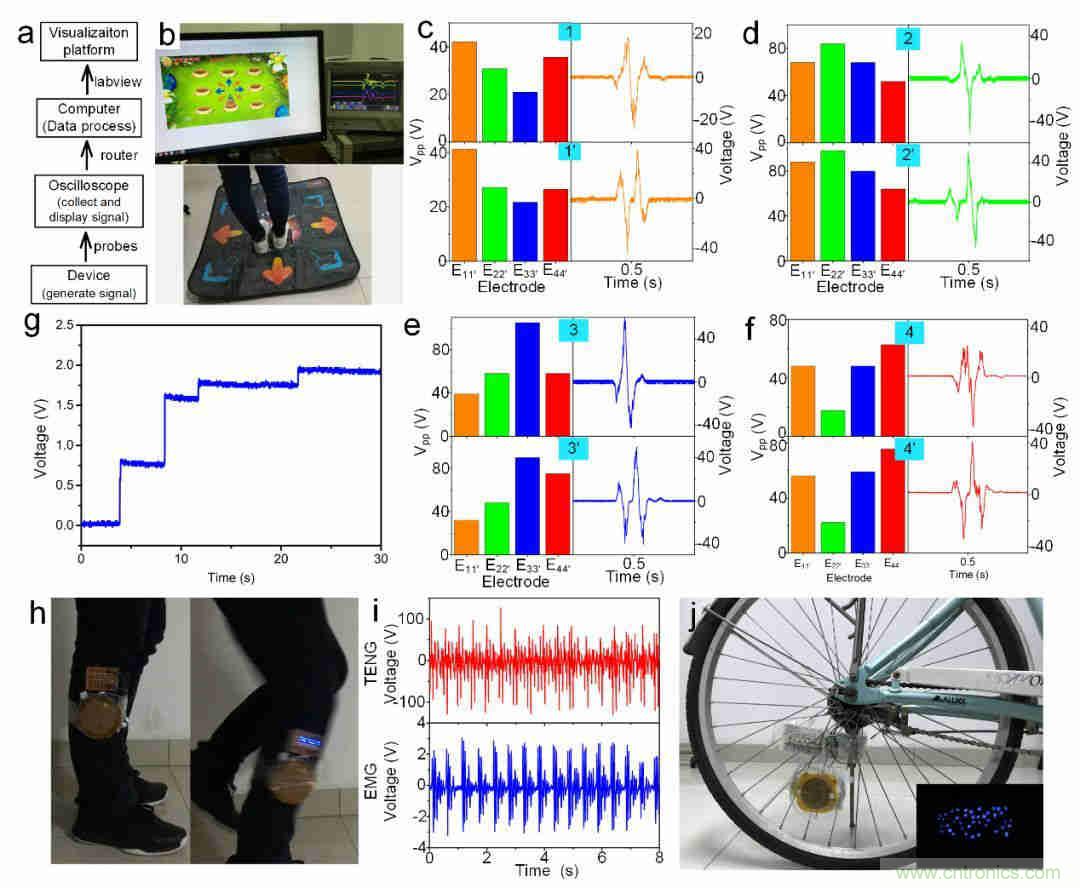
圖六:復(fù)合式發(fā)電機作為自驅(qū)動振動方向傳感器和能量采集器的應(yīng)用展示
(a-b)利用器件作為振動方向傳感器實現(xiàn)打地鼠游戲;
(c-f)當腳向8個方向移動時器件摩擦部分的電壓輸出信號;
(h,i)將器件固定到人體小腿采集跑步機械能;
(j)將器件固定到自行車車輪實現(xiàn)自驅(qū)動剎車燈。
針對生活中的機械能隨機無序、方向多變的特點,利用彈簧和磁體構(gòu)成諧振系統(tǒng)實現(xiàn)了可采集平面內(nèi)任意方向振動機械能的電磁摩擦復(fù)合式能量采集器,通過合理的結(jié)構(gòu)設(shè)計使器件的諧振頻率降低,時器件在低振動頻率下有效進行能量轉(zhuǎn)換,結(jié)合電磁發(fā)電極輸出電流大和摩擦發(fā)電機輸出電壓高的特點,使器件的充電能力大大提升。此外,得益于摩擦發(fā)電部分特殊的電極結(jié)構(gòu)設(shè)計,器件可對8個方向的脈沖振動進行識別,因此可作為自驅(qū)動振動方向傳感器,展現(xiàn)了在環(huán)境監(jiān)測、自驅(qū)動傳感系統(tǒng)、人機交互等領(lǐng)域巨大的應(yīng)用潛力。
推薦閱讀:



