
【導(dǎo)讀】繞線電阻額定功率通常為持續(xù)功率,不足以支持電動汽車應(yīng)用。典型應(yīng)用是大電容預(yù)充電和放電,通常稱為“軟啟動”。這種情況下,電阻的脈沖處理能力也非常重要。結(jié)合理論基礎(chǔ)與熱性能有限元模擬,可以確定較長脈沖持續(xù)時間內(nèi)的這種能力。所得具體結(jié)果便于快速評估不斷變化的客戶需求,提供合適的電阻。
1、繞線電阻容許脈沖負(fù)載
繞線功率電阻一般根據(jù)持續(xù)功率確定額定功率。然而,由于(電阻成分)用量多且熱容量高,電阻成分和繞線僅在中等溫升過程中即可吸收大量能量。因此,繞線功率電阻是脈沖負(fù)載應(yīng)用的理想選擇。
2、額定脈沖負(fù)載能力很重要
由于頻率和電壓轉(zhuǎn)換器的廣泛使用,額定脈沖負(fù)載能力變得越來越重要。脈沖負(fù)載能力通常只按一次脈沖的一定功率或能量和持續(xù)時間象征性來規(guī)定。列出幾個脈沖振幅和持續(xù)時間規(guī)定脈沖負(fù)載能力的情況極為少見。如果電阻所受脈沖沖擊持續(xù)時間不在數(shù)據(jù)表顯示的范圍內(nèi),且超出絕熱邊界條件的范圍,則很難計算最大允許脈沖負(fù)載。而理論基礎(chǔ)結(jié)合有限元模擬,可以計算出電阻在幾乎無限脈沖持續(xù)間隔下的功耗,即從非常短的脈沖到持續(xù)脈沖的熱性能。
3、電動汽車需要脈沖負(fù)載能力
電動汽車需要高脈沖負(fù)載高,限制電容器充放電電流是繞線電阻在電動汽車領(lǐng)域中的典型應(yīng)用。為了保持生產(chǎn)工藝盡可能簡單,首選方法是將所有電子器件焊接到PCB上,而不使用“外部”電阻。這種情況下,可將若干小的繞線功率電阻直接焊到PCB上,取代單個大的繞線功率電阻。
4、脈沖負(fù)載產(chǎn)生熱量
根據(jù)電阻散熱便能夠評估電脈沖負(fù)載的影響。一種有效方法是假定牛頓冷卻定律成立,即溫變率與熱電阻及其冷卻封裝材料的溫差成正比,后者溫度是恒定的。在水泥型繞線電阻的情況下(如AC-AT系列),封裝材料是繞線四周的水泥。不過,以下論證也可用于漆包或繞線電阻。
5、絕熱邊界條件下的脈沖負(fù)載
假定牛頓冷卻定律成立,因此繞線或電阻成分瞬時溫變與最大溫度成正比,可得出描述繞線和電阻溫度隨時間變化的指數(shù)函數(shù)。
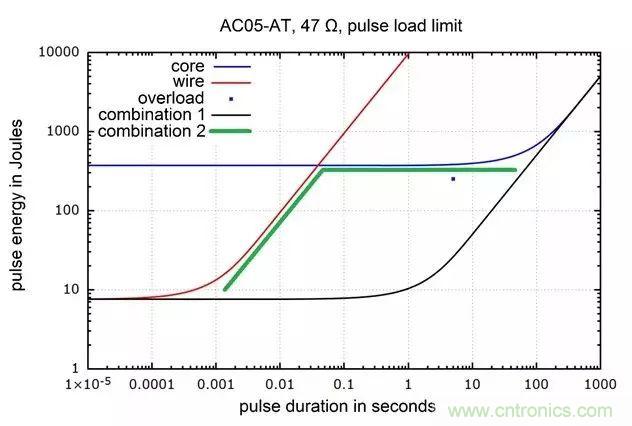
圖1:R=47Ω瓷芯AC05-AT(藍(lán)曲線)和電阻線(紅曲線)脈沖負(fù)載限制。兩條曲線通常組合在一起:組合1(黑曲線)低估允許的過載(藍(lán)點);組合2(綠線)高估所示扭折處脈沖負(fù)載極限(約0.05秒)
圖1中,藍(lán)線和紅線分別顯示瓷芯AC05-AT 47Ω電阻及其繞線各自的脈沖負(fù)載極限。整個電阻最大脈沖負(fù)載能力通常是兩條曲線的簡單組合。一種方法是牛頓冷卻型指數(shù)函數(shù),圖1中組合1,它遠(yuǎn)低于5秒標(biāo)稱功率規(guī)定的過載額定值10倍,因此低估了這一脈沖持續(xù)時間的脈沖負(fù)載能力。另一種方法,圖1中組合2,高估了所示扭折處(約0.05秒處)脈沖負(fù)載能力,因為計算繞線溫度極限時未考慮瓷芯的熱量。
6、脈沖負(fù)載FE模擬
利用有限元(FE)模擬,通過分析電阻器內(nèi)的熱流和溫度分布,很容易看出整個AC05-AT電阻在脈動電負(fù)載下緩慢變熱。電阻線在脈沖過程中升溫,然后冷卻。電阻其他部分被熱脈沖加熱的速度也延慢了。脈沖負(fù)載持續(xù)時間在有限元模擬中并不重要,只要邊界條件得當(dāng)。因此,從繞線(ms范圍)到電阻近乎連續(xù)負(fù)載(100s范圍)絕熱的角度看,幾乎可以模擬電阻和繞線任何脈沖持續(xù)時間內(nèi)的溫度。從而可根據(jù)繞線規(guī)定的最大允許溫度來確定允許的最大電脈沖負(fù)載。
7、延伸歸納
通過延伸繞線熱擴散特征時間,可以歸納多個脈沖持續(xù)時間的有限元模擬結(jié)果,從而確定修正系數(shù),結(jié)合指數(shù)函數(shù),根據(jù)牛頓冷卻定律給出溫度。
8、非絕熱邊界條件下的脈沖負(fù)載
上述修正系數(shù)可從繞線角度計算非絕熱邊界條件下的脈沖負(fù)載極限(圖2)。不過,未涵蓋長脈沖持續(xù)期間整個電阻的脈沖負(fù)載極限。但是,如果把整個電阻熱擴散特征時間延伸較長脈沖持續(xù)時間,則非絕熱極限曲線可以涵蓋連續(xù)負(fù)載極限曲線(圖2)。
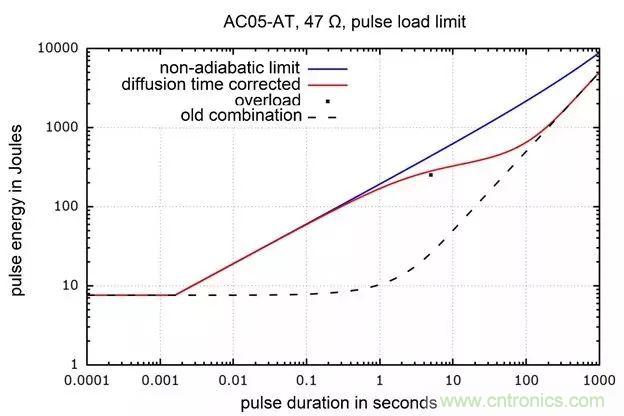
圖2:從繞線角度看非絕熱邊界條件下最大允許脈沖負(fù)載(藍(lán)曲線),根據(jù)相應(yīng)熱擴散特征時間進(jìn)行校正(紅曲線)。常見極限曲線很大程度上低估脈沖持續(xù)時間的脈沖負(fù)載能力,圖中所示從0.1 秒到10秒不等,供參考(黑虛線)。
9、用于其他阻值和電阻
通過適當(dāng)延伸,可以歸納特定電阻(本文為AC05-AT,47Ω)熱狀態(tài)的有限元模擬結(jié)果。這樣,所得結(jié)果不僅可以用于所有阻值(繞線配置)的AC05-AT,而且可以應(yīng)用于所有其他AC-AT類型的電阻,因為它們的結(jié)構(gòu)相似。
這種方法甚至可以用于所有其他相似類型的電阻,如G200系列,無需額外的FE模擬,因此效率極高。對于客戶的好處是能夠及時準(zhǔn)確地解決脈沖負(fù)載能力的問題。
推薦閱讀:
UCC28780自適應(yīng)零電壓開關(guān)有源鉗位反激式控制器



