

【導讀】隨著汽車工業(yè)的發(fā)展,汽車電子部件越來越多地被應用于現(xiàn)代汽車中,為汽車提供了更好的安全性、舒適性和經(jīng)濟性。以前汽車普遍采用手搖曲柄的方式使車窗玻璃上升或下降,現(xiàn)今轎車很多都安裝了電動車窗。而具有防夾功能的電動窗應用于汽車始于20世紀90年代,當玻璃上升途中遇到人力障礙時會自動識別而反向運行,防止乘員夾傷,實現(xiàn)防夾功能。
由于該功能的重要性,在歐美新車型上都已成為標準配置,目前國內(nèi)新推出的高端車型已成為標準配置。由于低成本方案的推出,經(jīng)濟型轎車也開始逐漸配備應用這一功能。而車窗位置判斷準確是車窗的防夾功能的正常實現(xiàn)的前提。
1準確判斷電動窗位置的重要性
法規(guī)規(guī)定,具有自動上升功能的車窗必須配備自動防夾功能。即當車窗在自動上升過程中如果,車窗玻璃遇到障礙物。必須做出判斷后反轉(zhuǎn),并且防夾力要小于100 N。而法規(guī)規(guī)定的防夾區(qū)域是4 mm~200 mm(如圖1)。這就要求系統(tǒng)對車窗的位置進行準確的計算和判斷。

圖1 法規(guī)防夾區(qū)域
如果車窗位置計算不準確會有以下后果:
1) 比如車窗在上升過程中在防夾區(qū)域內(nèi),如果車窗位置計算不準確,系統(tǒng)判斷為防夾區(qū)域外。車窗可能遇到障礙物,但是不做防夾反轉(zhuǎn)。而是繼續(xù)上升玻璃。障礙物如果是人,導致把人夾傷。

圖2 防夾車窗
2) 車窗自動上升過程中,如果車窗位置計算不準確,車窗就會到頂部位置認為在防夾區(qū)域內(nèi),遇堵后反轉(zhuǎn)。導致車窗不能關(guān)滿。
3) 車窗在上升過程中,由于存在車窗重量和窗框阻力等因素,在每個位置上的阻力大小是不一樣的。因此判斷車窗位置也是相當重要的。
由以上三點分析可知,車窗位置判斷的準確在防夾功能中,既有非常重要的意義。
2電動窗位置判斷的原理
從機械的角度講,電動車窗砸升降時,電機旋轉(zhuǎn)會帶動鋼絲繩的運動,從而帶動車窗的上下開閉。電機每旋轉(zhuǎn)一定的角度,鋼絲繩就相應地運動一定行程,因此車窗運動的行程與電機的旋轉(zhuǎn)的圈數(shù)成線性關(guān)系。通過計算電機旋轉(zhuǎn)的圈數(shù),可以間接算出車窗的位置。
2.1霍爾原理
電機的旋轉(zhuǎn)會使得霍爾傳感器產(chǎn)生脈沖信號。玻璃位置的檢測是通過對控制模塊中的霍爾傳感器發(fā)出的方波進行計數(shù)來實現(xiàn)。軟件設(shè)計中通過單片機芯片的輸入捕捉功能記錄車窗運行過程中的脈沖個數(shù),通過學習,將車窗的上密封條記為位置0,而下密封條為最大位置。在車窗上升過程中將位置計數(shù)器減1,上升到頂時位置計數(shù)器清0,下降時位置計數(shù)器加l。因此,可按照要求確定防夾區(qū)界限對應的位置計數(shù)器的值。通過對位置計數(shù)器的值的檢測可以間接判斷玻璃的位置。
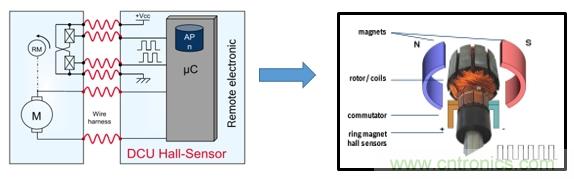
圖3 霍爾原理
脈沖計數(shù)方式的關(guān)鍵問題在于位置記錄要精確,但在試驗中卻存在電機切斷電源后依舊會發(fā)出幾個脈沖的問題,這幾個脈沖由慣性造成,而且不同的玻璃升降器產(chǎn)生的脈沖個數(shù)不同。這些脈沖對車窗位置影響隨情況的不同而不。在車窗上下兩端堵轉(zhuǎn)時,這些脈沖不太可能造成車窗位置的變化,而在中間位置停止時則有可能造成車窗位置移動,特別是下降途中人為停止時對車窗位置的影響更大。為了減小這種影響,與電機通電運動時位置計數(shù)一樣,在算法中捕捉這些脈沖。如果當前為下降狀態(tài),則對電機斷電后產(chǎn)生的脈沖進行位置加法操作,如果當前為上升狀態(tài),則對電機斷電后產(chǎn)生的脈沖進行位置減法操作。
2.2紋波原理
電機有磁極、轉(zhuǎn)子線圈、換向器組成。根據(jù)右手定律轉(zhuǎn)子線圈通電后再磁極磁場的作用下產(chǎn)生運動。運動到磁場邊緣是磁場變?nèi)?,電動勢減小,電流增大。換向器改變轉(zhuǎn)子線圈的電流方向,重新進入磁場電動勢增大,電流減小。轉(zhuǎn)子線圈不斷轉(zhuǎn)動、電動勢和電流不斷變化,從而紋波不斷產(chǎn)生。所以紋波是電機的固有特性,通過計算紋波的個數(shù)就能計算出轉(zhuǎn)子換向的次數(shù),就能計算出窗戶的相對位置,結(jié)合時間就能得出電機的轉(zhuǎn)速。
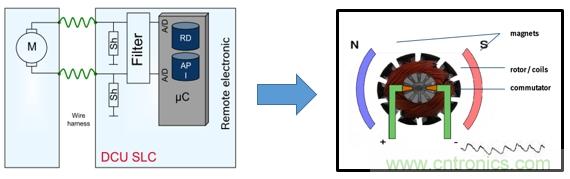
圖4 紋波原理
由于電機在啟動,停止,反轉(zhuǎn),堵轉(zhuǎn)時的紋波特征不明顯。如圖5和圖6,不能精準的計數(shù)紋波個數(shù)。只能通過算法進行補償。這樣紋波計數(shù)必然和實際的必然存在誤差。而這誤差隨著車窗操作次數(shù)的增加,誤差也會跟著累積。
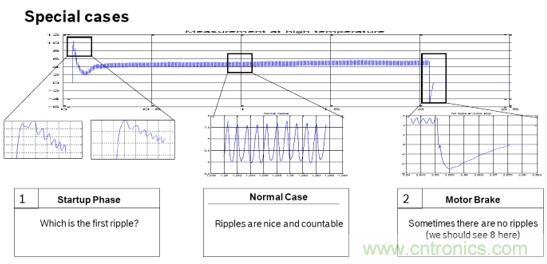
圖5 特殊場景一
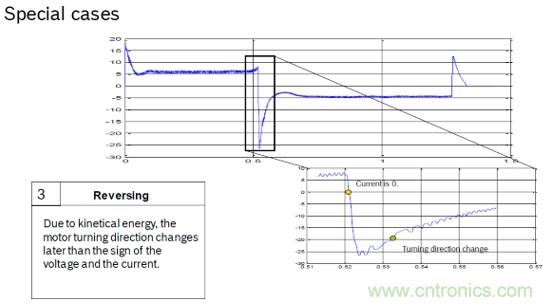
圖6 特殊場景二
出于舒適性對機構(gòu)噪聲要求和電機機構(gòu)的壽命保護。往往要求車窗到頂和到底停止做軟停止,即不是做堵轉(zhuǎn)停止,而是通過準確判斷車窗的位置,在接近頂或底的時候,停止對電機的輸出,通過慣性將車窗關(guān)滿。通過策略經(jīng)過幾次的操作車窗后才關(guān)閉軟停止,做堵轉(zhuǎn)學習車窗位置,消除誤差積累。這對車窗位置判斷精準度提出了更大的挑戰(zhàn)。
3判斷基于電流紋波的電動車窗位置的準確性的3種方法
3.1霍爾比較法
軟件開發(fā)前期,使用霍爾電機來開發(fā)紋波計數(shù)算法。開發(fā)2套算法。一套霍爾計數(shù)。一套紋波計數(shù)。通過霍爾計數(shù)值做車窗位置參考。來矯正紋波計數(shù)。給紋波補償和標定提供基準參考。通過高低溫高低壓組合多次實驗,如果通過霍爾計數(shù)得出的車窗位置和紋波計數(shù)得出的車窗位置做差值。如果在整個實驗過程始終是小于4 mm。那么可以認為紋波計算算法是準確的。此方法適用于算法開發(fā)階段,非常方便于開發(fā)者,方便做算法優(yōu)化和標定值選取。但是由于霍爾傳感器精度不高,(一般一個霍爾電機上會裝有2個霍爾傳感器,一個用于計算霍爾方波個數(shù),一個用于相位判斷電機的轉(zhuǎn)向)所以霍爾方法本身也會存在一定的誤差。只能做參考。真正紋波防夾升降器在產(chǎn)品階段是沒有霍爾傳感器的。
3.2多次不到頂和到底操作后4 mm防夾法
有軟停止功能的紋波計數(shù)的誤差清除策略往往是車窗操作經(jīng)過一個標定值的次數(shù)n后進行堵轉(zhuǎn)學習(前n次的停止做軟停止,誤差會累積)。因此我們可以通過n操作升降窗不到頂和底,不讓車窗做堵轉(zhuǎn)學習消除累積誤差。在第n+1次后拿4 mm測試棒放在窗頂(如圖7.),讓其做4mm防夾反轉(zhuǎn)。如果能堵轉(zhuǎn)反轉(zhuǎn),那么接下來要撤掉4 mm測試棒,執(zhí)行自動升窗,如果也能完成自動升降并關(guān)滿車窗。則可以說明紋波計數(shù)算法是比較準確的。
為什么第n+1次后防夾反轉(zhuǎn)后還要做確認是否能自動升窗把窗關(guān)滿這一項。因為第n+1次能防夾反轉(zhuǎn)有可能是誤差是向下誤差,比如在4 mm處軟件算法可能認為是10 mm處或其他。那么誤差較大的情況下也可防夾反轉(zhuǎn)。這種情況執(zhí)行自動上升的時候,在車窗0位置就有可能誤認為是防夾區(qū)域,從而導致關(guān)窗時候遇到頂又做防夾反轉(zhuǎn),導致關(guān)窗不滿。如果誤差是向上偏的,比如在10 mm位置,紋波計數(shù)算法認為是在小于4 mm的非防夾區(qū)域,就不做防夾反轉(zhuǎn)。那么車窗就會在4 mm棒處停止升窗。
此方法簡單直接,不需要借助太多的測試工具,可操作性強,適用于整個過程。非常適用于測試人員測試驗收。
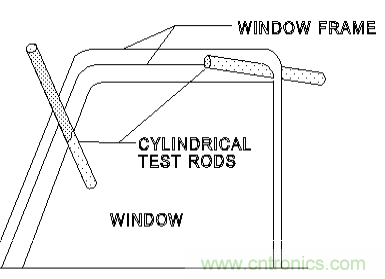
圖7 4 mm防夾測試
3.3紋波計數(shù)清零判斷法
紋波計數(shù)算法里,軟件里必然有用來代表紋波個數(shù)或車窗位置的變量,無論哪種策略,紋波的累積誤差的終究是必須消除的。那么在消除清0的前一個值就是誤差的累積值。通過監(jiān)控這個值。如果這個值始終對應的車窗位置是小于4 mm,那么肯定這個紋波計數(shù)算法是比較準確的。此方法判斷的準確性最高,適用用與整個過程。但是需要借助較多的其他輸出顯示工具。比較適用于開發(fā)人員。不方便測試人員。
4結(jié)論
本文首先闡述了電動車窗位置判斷準確性的重要性,然后分別介紹了基于霍爾的和基于電流檢測的電動窗的位置的判斷原理。就基于紋波的電動車窗位置的準確性的判斷3個方法進行了列舉詳細的闡述。綜合全文可知,電動窗的位置的判斷的準確性對車窗的防夾功能的正常實現(xiàn)影響很大。因此,希望本文檔內(nèi)容能夠給國內(nèi)整車廠和供應商在防夾電動窗開發(fā)和評估工人員一些參考。


