
【導(dǎo)讀】繼電器驅(qū)動(dòng)電流一般需要20-40mA或更大,線圈電阻100-200歐姆,因此要加驅(qū)動(dòng)電路。檢修方法非常簡(jiǎn)單,用萬(wàn)用表直流檔分別測(cè)量其輸入和輸出端電壓即可。
1、晶體管用來(lái)驅(qū)動(dòng)繼電器,必須將晶體管的發(fā)射極接地。具體電路如下:

NPN晶體管驅(qū)動(dòng)時(shí):當(dāng)晶體管T1基極被輸入高電平時(shí),晶體管飽和導(dǎo)通,集電極變?yōu)榈碗娖?,因此繼電器線圈通電,觸點(diǎn)RL1吸合。
當(dāng)晶體管T1基極被輸入低電平時(shí),晶體管截止,繼電器線圈斷電,觸點(diǎn)RL1斷開(kāi)。
PNP晶體管驅(qū)動(dòng)電路目前沒(méi)有采用,因此在這里不作介紹。
1.2電路中各元器件的作用
晶體管T1可視為控制開(kāi)關(guān),一般選取VCBO≈VCEO≥24V,放大倍數(shù)β一般選擇在120~240之間。電阻R1主要起限流作用,降低晶體管T1功耗,阻值為2 KΩ。電阻R2使晶體管T1可靠截止,阻值為5.1KΩ。二極管D1反向續(xù)流,抑制浪涌,一般選1N4148即可。
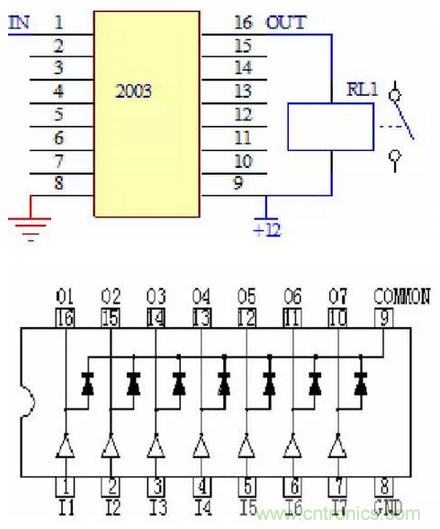
2 集成電路2003驅(qū)動(dòng)繼電器
左圖1~7是信號(hào)輸入(IN),10~16是輸出信號(hào)(OUT),8和9是集成電路電源。右圖是集成塊內(nèi)部原理圖。
2.1 工作原理簡(jiǎn)介
根據(jù)集成電路驅(qū)動(dòng)器2003的輸入輸出特性,有人把它簡(jiǎn)稱叫“驅(qū)動(dòng)器”“反向器”“放大器”等,現(xiàn)在常用型號(hào)為:TD62003AP。當(dāng)2003輸入端為高電平時(shí),對(duì)應(yīng)的輸出口輸出低電平,繼電器線圈通電,繼電器觸點(diǎn)吸合;當(dāng)2003輸入端為低電平時(shí),繼電器線圈斷電,繼電器觸點(diǎn)斷開(kāi);在2003內(nèi)部已集成起反向續(xù)流作用的二極管,因此可直接用它驅(qū)動(dòng)繼電器。
2.2 檢修
判斷2003好壞的方法非常簡(jiǎn)單,用萬(wàn)用表直流檔分別測(cè)量其輸入和輸出端電壓,如果輸入端1~7是低電平(0V),輸出端10~16必然是高電平(12V);反之,如果輸入端1~7是高電平(5V),輸出端10~16必然是低電平(0V);否則,驅(qū)動(dòng)器已壞。
測(cè)試條件:1.待機(jī);2.開(kāi)機(jī)。
測(cè)試方法:將萬(wàn)用表調(diào)至20V直流檔,負(fù)表筆接電控板地線(7812穩(wěn)壓塊散熱片),正表筆分別輕觸2003各腳。


