
【導(dǎo)讀】Mentor Graphics 近日發(fā)布一份題為《車載網(wǎng)絡(luò):應(yīng)用自動化設(shè)計與合成工具》的研究報告。本文將從汽車數(shù)據(jù)總線、網(wǎng)絡(luò)時序分析、定義網(wǎng)絡(luò)時序、汽車通信矩陣合成這幾個方面為大家詳細(xì)介紹。
《車載網(wǎng)絡(luò):應(yīng)用自動化設(shè)計與合成工具》的中文版報告全文可在 Mentor Graphics 的官方網(wǎng)站閱讀和下載: http://automotive.cn.mentor.com/news-publications/mentor-vehicle-networking 。
報告作者簡介
Andrew Patterson 任職明導(dǎo)嵌入式軟件事業(yè)部業(yè)務(wù)發(fā)展總監(jiān),專注于汽車市場。在加入明導(dǎo)之前,Andrew 在設(shè)計自動化市場上已有25年的經(jīng)驗(yàn),主要從事各類技術(shù)、汽車仿真模型開發(fā),虛擬原型和機(jī)電一體化。他目前在明導(dǎo)主要采用 Linux 和 AUTOSAR 以及其他在各類專有硅基平臺上運(yùn)行的系統(tǒng)來執(zhí)行嵌入式軟件戰(zhàn)略。Andrew 持有英國劍橋大學(xué)工程和電氣科學(xué)碩士學(xué)位。
背景介紹
自2003年組建以來,AUTOSAR (汽車開放系統(tǒng)架構(gòu))聯(lián)盟一直致力于改變車載網(wǎng)絡(luò)和電子控制單元 (ECU) 的設(shè)計方式。AUTOSAR 提出了一個符合業(yè)界標(biāo)準(zhǔn)的車載網(wǎng)絡(luò)設(shè)計方法,使行業(yè)能夠集成、交換和傳輸汽車網(wǎng)絡(luò)內(nèi)的功能、數(shù)據(jù)和信息。這一標(biāo)準(zhǔn)極大地促進(jìn)了汽車原始設(shè)備制造商 (OEM) 及其一級供應(yīng)商之間的合作,使他們能夠以一種一致、明確且機(jī)器可讀的格式來交換設(shè)計信息。
全文要點(diǎn)與大綱如下:
●汽車數(shù)據(jù)總線
一輛典型的現(xiàn)代化汽車將同時裝配各類總線和協(xié)議并從 LIN、CAN、FlexRay、MOST 和以太網(wǎng)中選擇合適的網(wǎng)絡(luò)。多媒體/視聽信號和汽車環(huán)繞攝像系統(tǒng)需要更高的數(shù)據(jù)速率,因此汽車制造商和 OEM 廠商在網(wǎng)絡(luò)解決方案上選擇用以太網(wǎng)代替 MOST。但對于許多標(biāo)準(zhǔn)汽車功能而言,LIN 和 CAN 提供的帶寬與性能就足夠了。
在汽車架構(gòu)中,ECU 組合在一起形成“集群”,這些集群通過通信“網(wǎng)關(guān)”相連。集群通常會共享同一類型的總線,因此要達(dá)到高可靠性、高速率的標(biāo)準(zhǔn),就要采用 FlexRay 網(wǎng)絡(luò),但要求沒那么高的門鎖 ECU 可以由 CAN 或 LIN 來負(fù)責(zé)。ECU 網(wǎng)關(guān)往往要連接不同類型的信號,并執(zhí)行不同總線架構(gòu)之間的映射和轉(zhuǎn)換功能。汽車行業(yè)對不斷提高安全性和 ISO26262等標(biāo)準(zhǔn)的合規(guī)性提出強(qiáng)烈需求,進(jìn)而提升了車載網(wǎng)絡(luò)的性能,同時也降低了制造和元件成本。不斷進(jìn)步的網(wǎng)絡(luò)標(biāo)準(zhǔn)可以適應(yīng)越來越高的數(shù)據(jù)傳輸速率,汽車電纜也達(dá)到了安全且低成本的目標(biāo)。典型汽車網(wǎng)絡(luò)方案的特點(diǎn)及應(yīng)用請見表1。

表1:汽車網(wǎng)絡(luò)總線
●網(wǎng)絡(luò)時序分析
接下來讓我們詳細(xì)討論 CAN 和 FlexRay 網(wǎng)絡(luò)的時序分析。了解這兩種類型網(wǎng)絡(luò)的基本特征和差異是非常有用的。
1、CAN 網(wǎng)絡(luò):
CAN 是使用較廣泛的一類車載網(wǎng)絡(luò),以 ISO 15765-2為運(yùn)行標(biāo)準(zhǔn)。CAN 總線提供了高水平的系統(tǒng)靈活性,能夠相對容易地將新的 ECU 接收器節(jié)點(diǎn)添加到現(xiàn)有的 CAN 網(wǎng)絡(luò)中,而不對現(xiàn)有的 ECU 節(jié)點(diǎn)做出大的硬件或軟件改動。對汽車設(shè)計人員而言,這可以極大地幫助他們擴(kuò)大或升級現(xiàn)有網(wǎng)絡(luò),或設(shè)計出新的變體車型。
2、FlexRay 網(wǎng)絡(luò):
FlexRay 協(xié)議比 CAN 更具確定性。FlexRay 是一種“時間觸發(fā)”協(xié)議,它提供不同選項(xiàng),讓信息可以在精確的時間框架內(nèi)發(fā)送至目標(biāo)地址 -- 可精確到1us。FlexRay 信息最多可達(dá)254個字節(jié),因此需要在 ECU 之間進(jìn)行交換的復(fù)雜信息的容量很大。與 CAN 相比,F(xiàn)lexRay 的數(shù)據(jù)傳輸速率也更高。由于時序是預(yù)先確定的,信息的安排需要提前規(guī)劃好,一般由汽車OEM廠商或一級供應(yīng)商合作伙伴預(yù)先配置或設(shè)計。在采用 CAN 協(xié)議的網(wǎng)絡(luò)中,ECU 節(jié)點(diǎn)只需要知道通信時的正確波特率,但 FlexRay 網(wǎng)絡(luò)上的 ECU 節(jié)點(diǎn)在通信時必須知道網(wǎng)絡(luò)各個部分是如何配置和連接的。檢查和驗(yàn)證 FlexRay 網(wǎng)絡(luò)的時序比較耗時 -- 因此,自動化的時序分析和將信息合成打包成時間幀可以減少錯誤和設(shè)計周期時間。
[page]
●定義網(wǎng)絡(luò)時序
模擬汽車網(wǎng)絡(luò)時序的第一步是準(zhǔn)確定義 ECU 之間的連接。AUTOSAR 提出的軟件方法將所有汽車功能定義成軟件組件的集合并映射到物理 ECU 硬件上。一個 ECU 可能有幾個功能,而內(nèi)部信號則在它們之間傳遞。一旦定義了連接,設(shè)計中每個對象的時序參數(shù)(如果是已知的)都可以被定義。時序信息有多個外部來源;被廣泛使用的汽車標(biāo)準(zhǔn)是 FIBEX -- 由自動化及測量系統(tǒng)標(biāo)準(zhǔn)化協(xié)會 (ASAM) 定義的一種基于 XML 的標(biāo)準(zhǔn)化文件格式。
示例系統(tǒng)的物理路徑請見圖1和圖2。制動位監(jiān)控器模塊與控制器 ECU 相連,轉(zhuǎn)而又連接到執(zhí)行器上。在每個模塊內(nèi)部,各個軟件組件也對延遲造成影響。我們將著眼于這些組件對整體系統(tǒng)延遲的影響。
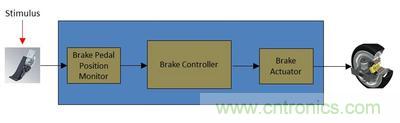
圖1:制動系統(tǒng)信號路徑概覽
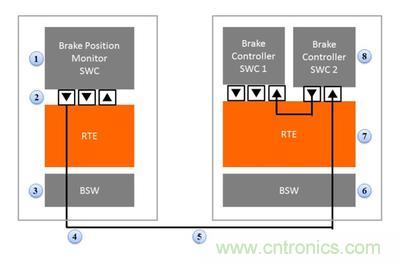
圖2:采用 AUTOSAR 組件的制動系統(tǒng) -- 可定義詳細(xì)的時序參數(shù)

表2:AUTOSAR 制動示例的傳輸步驟
在表2提供的示例中,端至端信號路徑最長可允許100ms。從實(shí)際測量結(jié)果中我們得知,發(fā)送方需要5ms,而接收方需10ms,因此通信路徑延遲最高可允許85ms。
如果使用先進(jìn)的 AUTOSAR 組件編輯器,如明導(dǎo)的 VSA COM Designer 工具,可以輸入路徑中每個組件的時序信息,但這也是一項(xiàng)艱巨的任務(wù)。另一種方法是從外部數(shù)據(jù)庫導(dǎo)入時序和連接信息。
在模擬 CAN 總線數(shù)據(jù)路徑時,需要考慮到傳輸開始時的不確定性。可能出現(xiàn)的情況是,更高優(yōu)先級的信息占用數(shù)據(jù)總線,從而造成傳輸延遲。因此要找出造成延遲變化的抖動因素 -- 通常要提前知道有多少優(yōu)先級較高的信號可能在總線上,這樣可以盡可能精確預(yù)測抖動因素。通過這些參數(shù)和進(jìn)行自動化設(shè)計規(guī)則檢查 (DRC),從第(3)步到第(7)步的最大延遲為74.5毫秒,這樣的設(shè)計檢查可以通過。這是“最壞情況”的測試,設(shè)計人員要相信路徑延遲永遠(yuǎn)不會比這更糟,實(shí)際上會好很多。
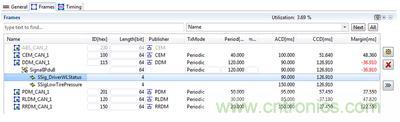
圖3:VSA COM 時序分析工具給出的典型時序報告,顯示 DRC 違規(guī)情況
圖3給出了一個典型的時序報告,其中信號路徑違規(guī)以紅色突出顯示。整體的總線利用率顯示在表的頂部(3.69%)。
●汽車通信矩陣合成
汽車網(wǎng)絡(luò)時序安排的總體定義通常存儲在作為中央網(wǎng)關(guān) ECU 一部分的“通信矩陣”中。明導(dǎo)所開發(fā)的設(shè)計工具解決方案可用于自動合成這個數(shù)據(jù)庫并按正確順序?qū)⑺胁煌男畔⒋虬蓭?/div>
AUTOSAR 信號信息組合成協(xié)議數(shù)據(jù)單元 (PDU),然后這些數(shù)據(jù)單元再組合成傳輸幀。對于 CAN 和 LIN 幀而言,每個幀都有一個 PDU,但一個 FlexRay 幀可能含有多個信號 PDU。
在安裝一個完全定義的通信體系時會面臨一個難題,即后續(xù)很難有架構(gòu)上的變化,并可能需要對網(wǎng)絡(luò)進(jìn)行全面的重新設(shè)計,但傳輸?shù)母咚俸痛_定性等優(yōu)勢讓這種方法對 FlexRay 應(yīng)用形成了極大的吸引力,能夠確保汽車的對安全要求非常高的功能。
結(jié)論
AUTOSAR 提供了用于車載網(wǎng)絡(luò)和 ECU 設(shè)計的預(yù)定義標(biāo)準(zhǔn)方法。但設(shè)計人員在如何提高設(shè)計的效率和性能上仍面臨難題。通過使用設(shè)計自動化輔助工具來計算時序并生成車載通信體系,可以極大提升寶貴的網(wǎng)絡(luò)帶寬的利用率,同時保持汽車性能的安全范圍。隨著 CAN、FlexRay 和以太網(wǎng)融合復(fù)雜性的增加,使用自動化設(shè)計規(guī)則檢查和時序性能合成工具將有助于縮短設(shè)計時間,避免繁瑣的人工驗(yàn)證過程。


