

【導讀】通常在討論這兩種工作模式的時候,所指的是理想的電壓模式和電流模式。然而,在實際的應用中,電流模式的開關電源系統(tǒng),當輸出負載變化時,或者在一些工作條件,為了系統(tǒng)的穩(wěn)定,增加一些補償?shù)男盘枺藭r,系統(tǒng)會在電流模式中引入部分的電壓模式特性,或者完全進入電壓模式。
1.1 輕載時電流模式趨向于電壓模式
電源系統(tǒng)進入輕載或空載時,變換器通常工作在突發(fā)模式和跳脈沖模式。對于跳脈沖模式,變換器進入非連續(xù)電流模式,高端的開關管的開通時間為控制器所設定的最小導通時間,同時在有一些開關周期,高端的開關管不導通,也就是屏蔽,或跳去一些開關脈沖,以維持輸出電壓的調(diào)節(jié)。
注意到:在輕載或空載時,電流信號很小,系統(tǒng)也很難檢測到電流信號,另一方面,由于高端的開關管的開通時間固定為最小導通時間,已不受電流檢測信號的調(diào)節(jié),電流反饋事實上已經(jīng)不起作用,也就不參與到反饋環(huán)節(jié)。系統(tǒng)此時工作于標準的電壓模式。
對于突發(fā)模式,輸出電壓完全由滯洄比較器控制,滯洄比較器控制通過檢測輸出電壓的變化,將輸出電壓設定在允許的上限和下限的范圍內(nèi),系統(tǒng)此時也是工作于標準的電壓模式。
1.2 使用大的電感值趨向于電壓模式
輸出電感的選擇及設計是基于輸出DC電壓的穩(wěn)態(tài)和瞬態(tài)的要求。較大的電感值可減小輸出紋波電流和紋波電壓,減小磁芯的損耗,但在負載瞬變過程中改變電感電流的時間會加長,同時增大電感的成本和體積。較小的電感值可以得到較低的直流銅損,但是交流磁芯損耗和交流繞線電阻損耗會變大。
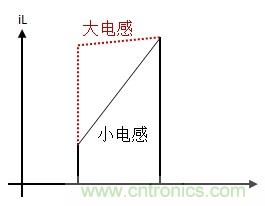
圖1:不同電感電流
同時使用大的電感時,電感電流的斜率減小,在理想的狀態(tài)下,若電感值為無窮大,那么在整個開關周期,電感電流為直流值,電流檢測信號就不在起作用,也就是標準的電壓模式。因此使用的電感值越大,工作于電流模式的控制就越接近于電壓模式,在負載瞬變過程中,系統(tǒng)動特性越差。因此對于電流模式,折衷的方法是選擇電感紋波電流峰峰值在輸出負載電流額定值的20%到40%之間。
1.3 斜坡補償?shù)碾娏髂J节呄蛴跒殡妷耗J?/strong>
理論上,當占空比大于50%時,電流模式就要加斜坡補償,系統(tǒng)才能穩(wěn)定的工作。否則,就會產(chǎn)生次諧波振蕩。在實際的應用中,占空比大于40%時,就要加斜坡補償。占空比大于50%時,斜坡補償,由于電感充分激磁,而去磁不足,因此輸出的電壓將比預設定的值高,并將繼續(xù)升高,直到較慢的電壓控制回路調(diào)整電流設定點為止,然后輸出電壓又下降至低于期望值,形成次諧波振蕩。
次諧波振蕩典型的特性就是在一個開關周期,脈沖寬度較寬,在下一個開關周期,脈沖寬度變窄,在每三個開關周期,脈沖寬度又變寬,如此反復。此時可以看到輸出電壓不穩(wěn)定,有時還可以聽到音頻的噪聲。
圖2中,紅線斜坡補償,實線三角形波為加斜坡補償?shù)碾姼械碾娏鞑ㄐ?,虛線為沒加斜坡補償?shù)碾姼械碾娏鞑ㄐ?。如果用下降沿的鋸齒波電壓,則其加在電壓誤差放大器的輸出上,用以控制電流檢測信號;如果用上升沿的鋸齒波電壓,則其加在電流檢測信號上,然后與電壓誤差放大器的輸出進行比較。
注意到,內(nèi)部的斜坡補償將使總的電流斜坡減小,即斜坡補償使真正的電感電流的斜率降低,可以去除不同占空比對平均電感電流大小的擾動作用,使得所控制的峰值電感電流最后收斂于平均電感電流,因而合成波形信號要有斜坡補償信號與實際電感電流信號兩部分合成構(gòu)成,從而促使變換器從電流模式向電壓模式轉(zhuǎn)化。
所加的斜坡補償越大,變換器越接近電壓模式,當外加補償斜坡信號的斜率增加到一定程度,峰值電流模式控制就會轉(zhuǎn)化為電壓模式控制。因為若將斜坡補償信號完全用振蕩電路的三角波代替,就成為電壓模式控制,只不過此時的電流信號可以認為是一種電流前饋信號。
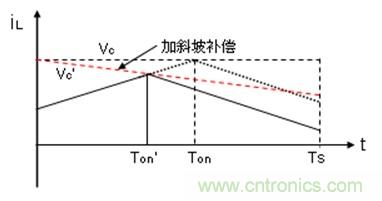
圖2:斜坡補償
斜坡補償也降低了電流環(huán)路的增益,降低的系統(tǒng)內(nèi)部設定的限流點,使系統(tǒng)實際所加的負載電流值降低。
當處于空載狀態(tài),輸出電流為零并且斜坡補償信號幅值比較大的話,峰值電流模式控制就實際上就完全變?yōu)殡妷耗J娇刂啤?nbsp;
通常在討論這兩種工作模式的時候,所指的是理想的電壓模式和電流模式。然而,在實際的應用中,電壓模式的開關電源系統(tǒng),即系統(tǒng)反饋環(huán)中沒有引入電流取樣信號,但也會采用其它的方式引入一定程度的電流反饋,電壓模式向電流模式轉(zhuǎn)變,從而提高系統(tǒng)動態(tài)響。
2.1 電壓模式中輸出電容ESR取樣形成的平均電流模式
理想的電壓模式在一定的反饋網(wǎng)絡參數(shù)下,很難在整個電壓輸入范圍和輸出負載變化范圍內(nèi)都能穩(wěn)定的工作。輸出負載變化可以通過加大輸出電容同時使用ESR值大的電容來優(yōu)化其動特性,盡管這樣做導致系統(tǒng)的成本和體積增加,同時增大輸出的電壓紋波。
通常,從直觀上理解,輸出電容ESR和輸出電容形成一個零點,對于電流模式,這個零點不是必需的,因為電流模式是單階的系統(tǒng),而且這個零點導致高頻的增益增加,系統(tǒng)容易受到高頻噪聲的干擾。所以電流模式或者使用ESR極低的陶瓷電容,使ESR零點提升到更高的頻率,就不會對反饋系統(tǒng)產(chǎn)生作用,或者再加入一個極點以抵消零點在高頻段的作用,加入極點的方法就是在ITH(Vc)管腳并一個對地的電容。
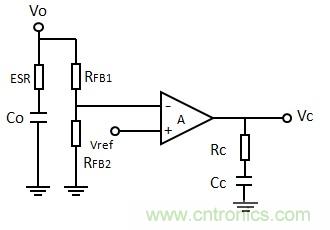
圖3:輸出電容ESR
電壓模式是LC形成的二階系統(tǒng),這個零點的引入可以一定的程度上抵消LC雙極點的一個極點,使其向單階系統(tǒng)轉(zhuǎn)化。ESR越大,作用越明顯。因此電壓模式輸出電壓通常使用ESR大的電容。
另一方面,注意到,輸出電壓為:
Vo=Vco+ESR*DIL
DIL=a*Io
Vco為輸出電容的容抗上的電壓,DIL為電感的紋波電流,a為電流紋波系數(shù),一般取0.2-0.4。
輸出電壓的小信號值為:
DVo=VDco+D(ESR*a*Io)
若ESR小,式中后面的一項基本可以忽略;但是,由于電壓模式通常使用ESR值較大的輸出電容,這樣ESR就不可以忽略,由于ESR的作用,相當于在輸入電壓的反饋信號中引入了一定程度的電流模式,電流模式反饋量為:D(ESR*a*Io)。
輸出電容的ESR將采樣的電流信號送到電壓誤差放大器的輸入端,和輸出電壓信號加在一起,經(jīng)過電壓誤差放大器放大,再送到PWM比較器,其工作的原理相當于平均電流反饋。在電壓模式中,使用ESR大的輸出電容,相當于引入一定程度的平均電流模式,從而增加系統(tǒng)對輸出負載變化的動態(tài)響應,提高系統(tǒng)的穩(wěn)定性。
2.2 電壓模式中輸入電壓前饋引入電流模式
對于輸入電壓的變化,目前通常采用輸入電壓前饋技術(shù),來提高系統(tǒng)對輸入電壓變化的響應。電壓模式中,內(nèi)部時鐘信號產(chǎn)生鋸齒波的斜率固定為k,圖2中的虛線所示。在沒有電壓前饋時,產(chǎn)生的占空比為D*Ts,則有以下公式:
Vc=k*D*Ts
輸入電壓前饋就是在內(nèi)部鋸齒波上加入隨輸入電壓變化的斜坡,或者從Vc信號減去此斜坡。若采用輸入電壓前饋加在內(nèi)部鋸齒波上的方式,若外加的前饋電壓斜坡的斜率為ks,內(nèi)部鋸齒波和外加斜坡之和為:k+ks。
前饋前壓的斜率隨輸入電壓增加而增大,ks正比于Vin,即:ks正比于kVin*Vin,所以此時的占空比為:
D1=Vc/(k+ks)*Ts=Vc/(k+kVin*Vin)*Ts
占空比隨輸入電壓的增加立刻而減少,圖2中的實線所示,系統(tǒng)提前對輸入電壓變化做出相應的響應。
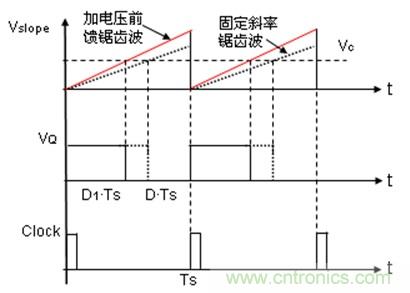
圖4:電壓模式加入輸入電壓前前饋
若不考慮效率,由功率平衡可以得到:Vin*Iin=Vo*Io,所以有:
ks=kVin*Vo*Io/Iin
從上式可以看到,所加的輸入電壓前饋信號也就是輸入的電流信號。事實上可以這樣理解:輸入電壓前饋技術(shù)也就是在理想的電壓模式中,疊加一定的電流反饋,以形成一定的電流反饋,從而增加系統(tǒng)對輸入電壓變化的響應。
推薦閱讀:




