
【導(dǎo)讀】在機(jī)器健康診斷系統(tǒng)中,便攜式信號(hào)采集發(fā)揮了很高的價(jià)值。本文中主要深入研究了操作簡(jiǎn)單而且成本低廉的低頻便攜式信號(hào)采集。設(shè)計(jì)中以單片機(jī)PIC18F1320作為核心,設(shè)計(jì)出能夠?qū)崿F(xiàn)信號(hào)采集并保存的信號(hào)采集電路。系統(tǒng)采用的芯片是串行電可擦除芯片24LC32A,該芯片能夠保存數(shù)據(jù),經(jīng)過有線通信,將信號(hào)數(shù)據(jù)從串行口輸送到微型計(jì)算機(jī)接受并保存,最后繪制出信號(hào)的波形。微型計(jì)算機(jī)程序采用Visual Basic編程,研究結(jié)果表明成功采樣頻率為3KHz的復(fù)雜信號(hào)。
信號(hào)采集設(shè)備廣泛使用于機(jī)器健康診斷系統(tǒng)中用來記錄、監(jiān)視和診斷。機(jī)器情況數(shù)據(jù)經(jīng)常由非便攜式或者帶導(dǎo)線的設(shè)備收集。對(duì)于一些重要的應(yīng)用,比如危險(xiǎn)或者遙遠(yuǎn)的地點(diǎn),尤其是在航空上,提供可以方便地?cái)y帶或者讀取的設(shè)備是必要的。另外,機(jī)器健康診斷尤其是機(jī)床振動(dòng)信號(hào)診斷經(jīng)常處理低頻信號(hào),這值得關(guān)注。
本文研究一種微控制器為基礎(chǔ)的信號(hào)采集系統(tǒng),以滿足信號(hào)采集的低成本和靈活模式。開發(fā)系統(tǒng)的主要硬件包括一臺(tái)微型計(jì)算機(jī)、一個(gè)以PIC18F1320為基礎(chǔ)的微控制器電路板以及串行通訊鏈接設(shè)備。EEPROM 24LC32A被用來進(jìn)行存儲(chǔ)器擴(kuò)展。微型計(jì)算機(jī)運(yùn)行控制程序。一旦用戶在微型計(jì)算機(jī)界面上決定采樣輸入,信息便通過RS-232端口送往微控制器。微型計(jì)算機(jī)和微控制器通過特定的協(xié)議通信。微型計(jì)算機(jī)告知微控制器模-數(shù)轉(zhuǎn)換的采樣間隔、采樣次數(shù)與采樣通道。電路板的設(shè)計(jì)考慮了開放式結(jié)構(gòu)。該系統(tǒng)采用了24引腳易于插拔的插座來容納Micro-chip微控制器。微處理器將調(diào)制的信號(hào)轉(zhuǎn)換成數(shù)據(jù)直接輸送到微型計(jì)算機(jī)或者存儲(chǔ)于EEPROM以便將來讀取。不同的命令與反饋代表系統(tǒng)的不同操作。電路板通過串行電纜在采集完信號(hào)后連接到微型計(jì)算機(jī)交互,也可以即時(shí)連接和傳送。
一、系統(tǒng)硬件設(shè)計(jì)
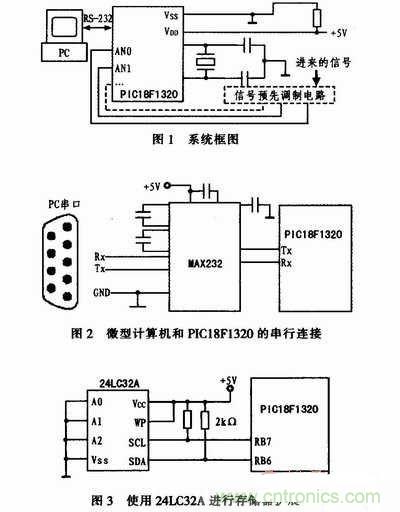
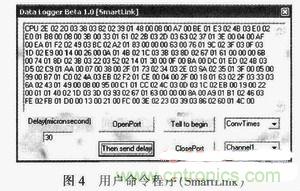
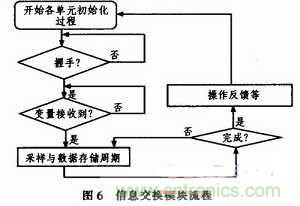
系統(tǒng)的主要原理圖如圖1所示。其中PIC18F1320控制器采用5 V電源供電,支持在線串行編程,最高時(shí)鐘頻率達(dá)到40 MHz,通訊波特率可以自動(dòng)檢測(cè)。端口A是雙向輸入/輸出復(fù)用管腳,ANO等管腳被定義成模擬輸入,由用戶進(jìn)行采樣通道的選擇??偣灿?3個(gè)模/數(shù)轉(zhuǎn)換通道且采樣時(shí)間可以編程。通道輸入的被測(cè)信號(hào)經(jīng)過電子電路調(diào)制成符合微控制器電氣要求的信號(hào)。調(diào)制信號(hào)經(jīng)過轉(zhuǎn)換變成寄存器內(nèi)的數(shù)據(jù),模數(shù)轉(zhuǎn)換的參考電壓為+5 V。電路板可在微控制器重新編程后方便地插入;同時(shí),電路板可通過跳線設(shè)置與終端用戶進(jìn)行電纜連接。由于微控制器與串行電路的電氣特性不同,工業(yè)標(biāo)準(zhǔn)級(jí)的MAX232芯片被使用以保證正確的數(shù)據(jù)傳輸(見圖2)。該芯片和PIC18F1320一樣適用于低功耗場(chǎng)合。MAX232上連接的電容采用的是電解電容,電容值為1 μF。MAX232的11腳或者10腳接微控制器的USART輸出端,12腳或者9腳接微控制器的USART輸入端。微控制器的存儲(chǔ)器擴(kuò)展使用了32 k的I2C串行EEPROM(見圖3),數(shù)據(jù)可以保持200年。EEPROM的地址線A0、A1、A2被接地。串行數(shù)據(jù)線SDA和串行時(shí)鐘線SCL被分別連接到微控制器的B端口相應(yīng)管腳。寫保護(hù)WP接+5 V。
二、系統(tǒng)軟件設(shè)計(jì)
1、微型計(jì)算機(jī)控制程序
微型計(jì)算機(jī)通過用戶友好命令程序或者M(jìn)icrosoft超級(jí)終端程序與用戶交互。兩種程序都有效地與微控制器交換命令和操作數(shù)據(jù)。
命令程序界面如圖4所示,采用Visual Basic編程。界面顯示了通信握手與反饋、用戶命令選擇以及轉(zhuǎn)換的數(shù)據(jù)。讀入的數(shù)據(jù)可以用文本的形式保存。信號(hào)波形繪制例子如圖5所示。用戶應(yīng)該選擇正確的采樣間隔以保證采樣過程的準(zhǔn)確性。一般來說,通信設(shè)置的修改由用戶負(fù)責(zé)進(jìn)行。
2、微控制器算法
一旦采樣變量值被確定,信息交換模塊接手整個(gè)工作。該模塊的算法如圖6所示。模塊接收采樣間隔、采樣次數(shù)和采樣通道的決定。算法采用正確的過程以保證滿足產(chǎn)品手冊(cè)的要求從而獲得更好的模-數(shù)轉(zhuǎn)換和數(shù)據(jù)記錄成功。在采樣過程結(jié)束后,數(shù)據(jù)轉(zhuǎn)換信息通過串口以48 00、9 600或者19 200 b/s波特率輸送給微型計(jì)算機(jī)。該波特率由用戶和編程者給定。
由于微控制器算法用MPLAB C18或者匯編語言編程,將編譯過的程序下載到微控制器是必要的。為了驗(yàn)證程序和芯片上的EEPROM數(shù)據(jù),MPLAB IDE 6.5被采用。該軟件描述了微控制器部分內(nèi)存消耗情況,這有助于用戶了解內(nèi)存的使用百分比以及EEPROM和RAM是如何被安排來存儲(chǔ)程序算法和轉(zhuǎn)換的數(shù)據(jù)。
結(jié)語:本文深入研究了新型的操作簡(jiǎn)單且成本低廉的信號(hào)采集系統(tǒng),對(duì)其制作過程以及編程方面都進(jìn)行分析,方案設(shè)計(jì)的結(jié)果證明機(jī)器健康診斷信號(hào)采集做到簡(jiǎn)單低成本的設(shè)計(jì)思路是可行的。但是精度及容量擴(kuò)展方面還需進(jìn)一步完善。
相關(guān)閱讀:
技術(shù)分享:基于FPGA的水聲信號(hào)采集與存儲(chǔ)系統(tǒng)的設(shè)計(jì)
技術(shù)達(dá)人:音頻信號(hào)采集與AGC算法的DSP實(shí)現(xiàn)
霍爾傳感器信號(hào)采集與顯示系統(tǒng)設(shè)計(jì)
相關(guān)閱讀:
技術(shù)分享:基于FPGA的水聲信號(hào)采集與存儲(chǔ)系統(tǒng)的設(shè)計(jì)
技術(shù)達(dá)人:音頻信號(hào)采集與AGC算法的DSP實(shí)現(xiàn)
霍爾傳感器信號(hào)采集與顯示系統(tǒng)設(shè)計(jì)



