
【導讀】本文將介紹智能手機環(huán)境中傳感器融合的概念,討論如何使用傳感器融合軟件提高總體精度,并介紹在許多旗艦智能手機上執(zhí)行的、包括性能結(jié)果測量在內(nèi)的一種測試方法。
隨著智能手機等功能強大的智能設(shè)備不斷進步,新的應(yīng)用層出不窮,系統(tǒng)開發(fā)經(jīng)常跟不上不斷變化的新要求。如今,諸如室內(nèi)導航和增強現(xiàn)實等使用運動或位置數(shù)據(jù)的新應(yīng)用,都要求用戶接受原本是為簡單游戲應(yīng)用開發(fā)的、不太完美的傳感器融合。但是,最終用戶很容易發(fā)現(xiàn)這些實現(xiàn)具有相當多的缺點,并且精度很低。
傳感器融合是一種創(chuàng)新的工程技術(shù),通過整合來自各種系統(tǒng)傳感器的數(shù)據(jù),來保證更加精確、完整和可靠的傳感器信號或感知信息。要想實現(xiàn)始終精確的傳感器融合,工程師在決定如何優(yōu)化整合來自這些傳感器的數(shù)據(jù)之前,深入理解傳感器的優(yōu)缺點很重要。一種可成功實現(xiàn)的方法是使用基于加速度計、磁力計和陀螺儀等傳感器信號的融合數(shù)據(jù)庫,并通過補償每種傳感器的缺點,來提供高精度、可靠和穩(wěn)定的方位數(shù)據(jù)。
隨著最終用戶不斷接觸到這些新的應(yīng)用,他們希望能有更加精確和可靠的解決方案。將傳感器用于在已知固定位置之間跟蹤用戶的室內(nèi)導航與早期的GPS設(shè)備非常類似,只有質(zhì)量優(yōu)異的傳感器融合,才可以提供所要求的逼真度、精度乃至用戶信心。OEM廠商都明白這一點,因此大多數(shù)廠商都認為這是實現(xiàn)產(chǎn)品差異化的良好契機。
另外一個例子是從虛擬現(xiàn)實到增強現(xiàn)實的進步。在虛擬現(xiàn)實(VR)系統(tǒng)中,用戶與現(xiàn)實世界相隔離,沉浸于一個人造世界中。而在增強現(xiàn)實(AR)系統(tǒng)中,用戶仍能與現(xiàn)實世界相接觸,同時又能與他們周圍的虛擬物體進行互動。利用現(xiàn)有的技術(shù),信息傳送的延遲對用戶來說是不能忍受的—增強現(xiàn)實中的這種錯位可能導致非常糟糕的用戶體驗。
對OEM廠商和平臺開發(fā)人員(即操作系統(tǒng)開發(fā)人員)來說,最大的挑戰(zhàn)是需要確保所有器件都能提供滿足這些應(yīng)用穩(wěn)定工作要求的性能。舉例來說,安卓設(shè)備中有許多不同的軟硬件組合,每種組合都會產(chǎn)生不同的輸出質(zhì)量。目前沒有標準的測試程序,這意味著應(yīng)用開發(fā)人員不能依靠安卓傳感器數(shù)據(jù)在許多不同平臺上實現(xiàn)相同的性能。以下是用運動跟蹤攝像頭系統(tǒng)分析和比較不同軟硬件組合性能從而設(shè)定最小性能標準的建議。性能分析是通過測量系統(tǒng)的4個關(guān)鍵性能指標(KPI)實現(xiàn)的,這些指標是:靜態(tài)精度、動態(tài)精度、方位穩(wěn)定時間和校準時間。
攝像頭系統(tǒng)通過跟蹤物體上的標記根據(jù)物體(智能手機)的運動產(chǎn)生方位矢量,這些矢量再與手機中傳感器創(chuàng)建的矢量進行比較。數(shù)據(jù)記錄應(yīng)用程序?qū)@些矢量進行同時記錄,該應(yīng)用程序支持最終用戶設(shè)備的直接比較。
本文將介紹智能手機環(huán)境中傳感器融合的概念,討論如何使用傳感器融合軟件提高總體精度,并介紹在許多旗艦智能手機上執(zhí)行的、包括性能結(jié)果測量在內(nèi)的一種測試方法。
文章所描述的融合庫使用加速度計、磁力計和陀螺儀傳感器信號補償彼此的缺點,并提供高精度、可靠和穩(wěn)定的方位數(shù)據(jù)。下面著重分析這些關(guān)鍵器件的優(yōu)缺點,以及它們是如何補償彼此缺點的(圖1)。

圖1:MEMS傳感器的固有特性。
物體的方位描述了它在三維空間中是如何放置的,一般來說,方位是相對于一個坐標系中規(guī)定的參考系進行定義的。至少需要3個獨立的值作為三維矢量的一部分,用于描述真正的方位。物體的所有點在旋轉(zhuǎn)過程中都會改變它們的位置,位于旋轉(zhuǎn)軸上的點除外。
磁力計
磁力計對干擾性的本地磁場和畸變高度敏感,它們?nèi)菀自斐捎嬎愕玫降拇藕较虺霈F(xiàn)錯誤。陀螺儀可以用來在沒有旋轉(zhuǎn)記錄的情況下檢測這種干擾和航向變化。傳感器融合隨后通過給陀螺儀數(shù)據(jù)提供比磁力計數(shù)據(jù)更多的權(quán)重,就可以精確地進行補償。
地球磁場的水平分量用于計算磁航向,而俯仰角和滾轉(zhuǎn)角分別是沿著水平(X)和垂直(Y)軸的傾斜角。這些傾斜角影響XY軸方向的磁場。當設(shè)備不處于水平位置時,即傾斜角不是零時,航向計算將不正確。因此在利用加速度計,通過旋轉(zhuǎn)XY平面對方位進行計算之前,確保這些傾斜角得到補償很重要。
[page]
加速度計
加速度計只能測量因設(shè)備運動引起的加速度和因重力引起的加速度在內(nèi)的總加速度值,而不能檢測二者之間的區(qū)別,因此需要將重力和運動分開來:
線性加速度=加速度-重力加速度
可以將重力矢量想象為一種指示重力方向和幅度的三維矢量。當設(shè)備處于靜止狀態(tài)時,重力傳感器的輸出應(yīng)該與加速度計的輸出相同。
線性加速度可以被看作是一個指示每個設(shè)備軸向加速度的三維矢量,并且在手機應(yīng)用中被認為與重力分量無關(guān)。
此時就用得到陀螺儀了。陀螺儀可以用來檢測設(shè)備何時處于靜止狀態(tài),并觸發(fā)重力矢量偏移校準的計算。結(jié)果可再轉(zhuǎn)而用于計算設(shè)備運動過程中的動態(tài)分量(線性加速度)。
陀螺儀
陀螺儀可以提供圍繞著三個軸的旋轉(zhuǎn)速度,因此可以用來跟蹤設(shè)備在運動中的方位。陀螺儀可以跟蹤的旋轉(zhuǎn)速度高達2000度每秒(dps),而磁力計可跟蹤的速度被限制在約400dps以下。但是,陀螺儀只能輸出相對位置,因此需要有一個不失真的磁力傳感器作為參考。
所有消費級陀螺儀都存在固有的漂移誤差,因此即使設(shè)備處于穩(wěn)定狀態(tài),陀螺儀也會隨著時間和溫度的變化發(fā)生一定程度的旋轉(zhuǎn)。為了糾正這些誤差,可以用高穩(wěn)定性的加速度計檢測靜止狀態(tài),然后經(jīng)計算進行適當?shù)难a償。
現(xiàn)實世界設(shè)計
傳感器融合是一個高度專業(yè)化的設(shè)計領(lǐng)域,需要熟練掌握建模和仿真技術(shù)。它要求盡最大可能地理解傳感器的工作細節(jié)以及它們的缺點和交互情況。多年來,人們的關(guān)注點已經(jīng)被帶進導航、智能手機應(yīng)用和游戲等領(lǐng)域。但直到現(xiàn)在,借助大量知識的儲備和累積,才使得人們可以獲得真實和精確的結(jié)果。
在基于傳感器融合的系統(tǒng)中,操作需要進行精細調(diào)整?,F(xiàn)實世界中沒有什么事像“即插即用”這么簡單。一個系統(tǒng)的試運行要求必須調(diào)整參數(shù),而且每個傳感器的操作之間存在交互,因此很容易變成高度復(fù)雜的反復(fù)過程。如今的軟件具有以很高層次執(zhí)行這種“精細調(diào)整”的能力,并且可以向OEM廠商提供簡單直觀的濾波器調(diào)整程序(圖2)。
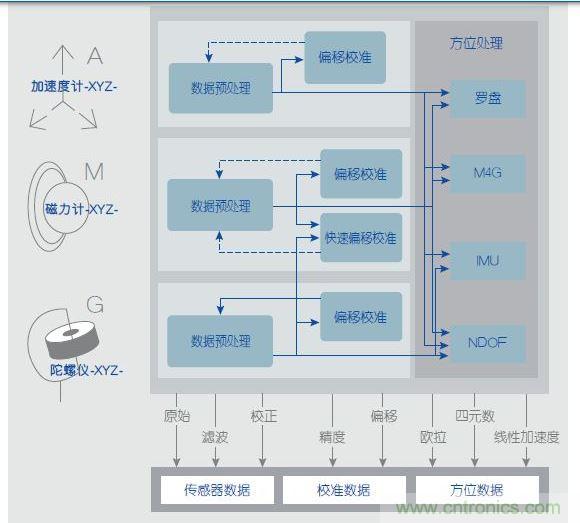
圖2:典型的傳感器融合軟件架構(gòu)。
預(yù)定義濾波器使得精細調(diào)整速度更快
既然傳感器融合操作的精細調(diào)整已發(fā)展并簡化成了濾波器調(diào)整任務(wù),它就給開發(fā)人員提供了一個有價值的機會。通過適當調(diào)整濾波器,開發(fā)人員或OEM廠商可以讓最終產(chǎn)品以市場差異化的方式運行。由于所有權(quán)衡管理都是自動完成的,開發(fā)人員可以做出有效的決策,例如在最高穩(wěn)定性和最高性能之間做出權(quán)衡,以便適應(yīng)最終目標市場。
關(guān)鍵性能指標測量設(shè)置
所有傳感器融合技術(shù)并不等同。在現(xiàn)有的實現(xiàn)技術(shù)和測試方面,不同供應(yīng)商之間有很大差異。為了得到正確結(jié)果,必須采用含有經(jīng)過驗證的精確庫的正確軟件方法。
所有硬件在接口和時序參數(shù)方面必須兼容和匹配。合理的方法是確保攝像頭系統(tǒng)的性能,這些系統(tǒng)將通過跟蹤物體上的標記根據(jù)物體(本例中是智能手機)移動產(chǎn)生方位矢量。方位矢量再與傳感器創(chuàng)建的、用數(shù)據(jù)記錄應(yīng)用同時記錄的矢量進行比較。使用這種基于攝像機的系統(tǒng)允許對最終商用設(shè)備進行直接比較。
靜態(tài)精度
靜態(tài)精度被定義為設(shè)備置于穩(wěn)定位置時,測量到的設(shè)備方位與實際設(shè)備方位之間的偏差。為了計算靜態(tài)精度,需要手機在多個位置靜止放置時收集航向、俯仰和滾轉(zhuǎn)方面的成套數(shù)據(jù)。一個設(shè)備的靜態(tài)精度主要受磁力計和陀螺儀的硬件參數(shù)以及軟件中給它們分別分配的權(quán)重影響。在具有低靜態(tài)精度值的設(shè)備中,最終用戶可以在羅盤或地圖應(yīng)用的絕對航向中看到很大偏差,當設(shè)備處于靜態(tài)狀態(tài),他們還能在交互式應(yīng)用中見到抖動(很小的旋轉(zhuǎn)移動)。這是由于軟件校正陀螺儀漂移引起的。
[page]
動態(tài)精度
動態(tài)精度被定義為設(shè)備在運動時,測量到的設(shè)備方位與實際設(shè)備方位之間的偏差。由于在運動期間涉及到旋轉(zhuǎn)加速度,測量起來更加困難。動態(tài)精度是在手機以不同運動模式(8字舞、慢速線性、快速和慢速旋轉(zhuǎn)以及游戲動作)運動時,通過采集航向、俯仰和滾轉(zhuǎn)等成套數(shù)據(jù)進行計算的。所有數(shù)據(jù)都以最快可能的數(shù)據(jù)速率進行采集。
在具有低動態(tài)精度的設(shè)備中,最終用戶可以看到屏幕上的移動與設(shè)備實際運動之間有很大偏差。這在增強現(xiàn)實應(yīng)用中特別引人注意,因為增強單元的移動與現(xiàn)實世界不是同步的。這也是用戶在使用虛擬現(xiàn)實幾分鐘后就感到不滿意的原因之一。
雖然直接關(guān)系不是很明顯,但大誤差的動態(tài)精度也是室內(nèi)導航應(yīng)用性能差的主要原因。由于用戶在已知固定點之間導航(比如從Wi-Fi或藍牙信標開始),傳感器數(shù)據(jù)可用于計算軌跡。然而,航向誤差將隨著時間的推移而累積,因此具有15°較差動態(tài)精度的設(shè)備很容易在20s~30s時間內(nèi)產(chǎn)生超過100°的累積誤差。諸如地圖匹配等更高層處理也許可以做些修正,但代價是更大的功耗(圖3)。
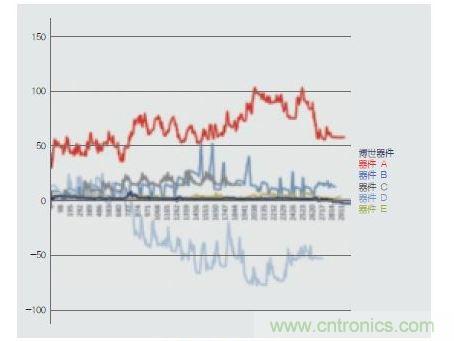
圖3:方位隨時間發(fā)生偏離。
校準時間
校準時間被定義為在純凈的磁場環(huán)境中校準設(shè)備中的磁力傳感器,使之從未校準狀態(tài)到完全校準狀態(tài)所需的時間。所有磁性傳感器都需要進行校準,但用于校準的方法定義了最終用戶是否需要校準以及如何去校準。
一些設(shè)備采用8字舞校準方法,即提示最終用戶將設(shè)備在空氣中做8字運動完成設(shè)備的校準。即使是由有經(jīng)驗的測試人員來做,這種方法也要花5s~6s的時間才能完成設(shè)備校準。
具有較短校準時間的設(shè)備使用陀螺儀校準磁力傳感器,這意味著校準可以在背景中運行,所要求的設(shè)備移動幅度要小得多。這些移動通常在正常操作中進行,最終用戶永遠不必主動去校準傳感器。博世傳感器技術(shù)公司的快速磁力校準(FMC)算法就是使用后一種方法來確保較短的校準時間。
方位穩(wěn)定時間
方位穩(wěn)定時間被定義為“運動之后”到達精確、穩(wěn)定方位狀態(tài)所需的時間。方位穩(wěn)定時間應(yīng)盡可能短,以便用戶看不到他們停止移動設(shè)備與設(shè)備停止移動并穩(wěn)定到正確位置之間的延遲。當設(shè)備的靜態(tài)和動態(tài)精度都很差時,設(shè)備上的這種延遲就很明顯,因為需要更多時間校正移動中累積的誤差。這種效應(yīng)在需要實時響應(yīng)的游戲和虛擬/增強現(xiàn)實應(yīng)用中尤其令人討厭。
從詳細的評估和分析來看, 顯然本文所述的傳感器融合現(xiàn)在可以廣泛應(yīng)用于專業(yè)級和消費級市場?,F(xiàn)場試驗表明,用戶可以在性能和精度方面獲得有價值的升級。雖然硬件和軟件方面的概念和工程技術(shù)比較復(fù)雜,但對開發(fā)人員來說,從當前傳感器融合過渡到這種先進解決方案的任務(wù)卻相對簡單。
傳感器融合技術(shù)現(xiàn)在已經(jīng)發(fā)展到相當成熟的階段。通過將傳感器和傳感器融合構(gòu)建模塊設(shè)計到相同封裝中,可以確保這些單元得到最優(yōu)化,并能夠很好地協(xié)同工作。系統(tǒng)設(shè)計師不再需要在組裝、優(yōu)化和調(diào)試傳統(tǒng)“永遠在線”子系統(tǒng)方面花費時間,因為通過設(shè)計,每個器件都對最高精度和最低功耗做了優(yōu)化。
這種高度的技術(shù)和設(shè)計創(chuàng)造性帶給開發(fā)人員的優(yōu)勢,可以給OEM廠商提供巨大好處,他們不僅能夠向市場推出高度差異化的產(chǎn)品,而且其向用戶提供的整個新一代電子設(shè)備還將具有顯著改進的性能和功效。



