
【導讀】加速度傳感器能夠測量各個方向上的加速度,由此可以計算出傾斜角,這在汽車、可穿戴設備以及到工業(yè)系統(tǒng)中都有廣泛的應用。本文介紹單軸加速度傳感器應用過程中的兩個設計要點,希望能夠助力小伙伴們做好設計。
單軸加速度傳感器的設計要點是什么?
單軸加速度傳感器檢測傾斜角時,檢測軸垂直于重力平面還是平行于重力平面?
單軸加速度傳感器可以用在比較簡單應用,比如簡單的有限角度傾斜角檢測。以檢測汽車的傾斜角來舉例,為了防止汽車側滑和翻車,一般汽車會采用一個加速度傳感器來檢測汽車的傾斜角。此時檢測軸應該垂直于重力平面。因為檢測軸與重力平面垂直時,加速度傳感器對于小角度變化的敏感度比較高,而汽車傾斜的角度一般不會太大。下面我們對比這兩種安裝方式的區(qū)別。
如下圖,坡度角θ。下圖左邊,檢測軸X軸垂直于重力平面(坡度為0時),此時加速度傳感器的輸出Ax=sin(θ)*1g。下圖右邊,檢測軸Z軸平行于重力平面(坡度為0時),此時加速度傳感器的輸出Az=cos(θ)*1g。
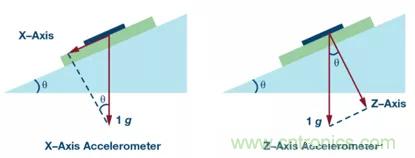
圖1:X軸和Z軸加速度傳感器安裝示意圖
我們把這兩種方式集中到一個圖。來對比兩種方式下,加速度傳感器的輸出變化。下圖中,紅色線段的長度,對應檢測軸垂直于重力平面時,加速度傳感器的輸出。綠色線段的長度,對應檢測軸平行于重力平面時,加速度傳感器的輸出。
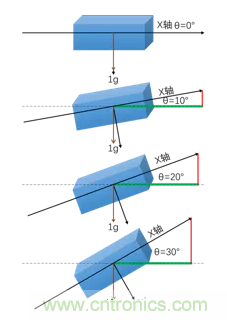
圖2:重力加速度在檢測軸上的分量
可以看出,當θ從0°到30°變化時,紅色線段變化明顯,而綠色線段則變化不明顯??梢钥闯鲈趦A斜角小角度變化時,檢測軸垂直于重力平面的安裝方式,得到的靈敏度更高?,F(xiàn)實世界中,道路上的絕大多數(shù)斜坡坡度不會超過30°。因此在檢測汽車傾斜角的方案中,如果使用單軸加速度傳感器,設置檢測軸方向垂直于重力平面方向比較合適。當然,如果傾斜角度在60°到90°范圍內(nèi),由于加速度傳感器與傾斜角度成sin(θ)函數(shù)的關系,加速度傳感器對角度變化的敏感度降低。
如何根據(jù)應用要求,來計算單軸加速度傳感器最小靈敏度?
假設實際應用要求傾斜角檢測范圍在-63°到+63°之間,并且檢測結果可以精確到1°。首先,引入增量靈敏度慨念,增量靈敏等于每個傾斜角步進對應的輸出增量,單位以mg顯示。S[g] = 1g*(sin(θ+P)-sin(θ)),(θ為當前角度,P為步長),增量靈敏度反應了輸出變化大小。設傾斜角度θ為X, 對應的增量靈敏度S[g]為Y作圖,我們得到:
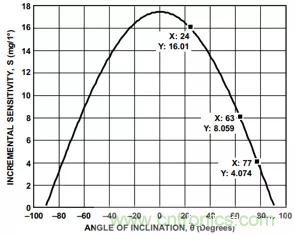
圖3:步進為1°時,增量靈敏度曲線
為了滿足應用在整個傾斜角檢測范圍內(nèi)分辨率的要求,可以利用上圖的曲線來確定系統(tǒng)的最小靈敏度。假設應用要求最小分辨率為1°,傾斜角檢測范圍在-63°到+63°之間。根據(jù)上圖, 增量靈敏度在傾斜角0°到90°變化時, 逐漸變小,當?shù)竭_63°時,靈敏度降至4.074mg/1°。
對于數(shù)字輸出加速度傳感器,靈敏度一般使用LSB/g來表示。LSB為最低有效位,g為重力加速度。每個LSB要區(qū)分4.074mg輸出, 那么對應靈敏度最少是246LSB/g (1g/4.074mg)。在選擇加速度傳感器時,應保證加速度傳感器的靈敏度大于計算所得的最小靈敏度。
來源:得捷電子DigiKey


