
【導(dǎo)讀】工業(yè)物聯(lián)網(wǎng)(IoT)正在醞釀廣泛的轉(zhuǎn)變,這種轉(zhuǎn)變不僅將使互聯(lián)機(jī)器間的相互檢測成為一種競爭優(yōu)勢,還將使其成為必不可少的基本服務(wù)。工業(yè)物聯(lián)網(wǎng)以邊緣節(jié)點(diǎn)為起始點(diǎn),后者是檢測和測量的目標(biāo)切入點(diǎn)。這是物理世界與計(jì)算數(shù)據(jù)分析進(jìn)行交互的接口所在。互聯(lián)的工業(yè)機(jī)器可檢測大量的信息,進(jìn)而用于制定關(guān)鍵決策。這種邊緣傳感器可能遠(yuǎn)離存儲(chǔ)歷史分析的云服務(wù)器。它必須通過將邊緣數(shù)據(jù)聚合到互聯(lián)網(wǎng)的網(wǎng)關(guān)進(jìn)行連接。理想情況下,邊緣傳感器節(jié)點(diǎn)具有很小的規(guī)格尺寸,可在空間受限的環(huán)境中輕松進(jìn)行部署。
檢測、測量、解讀、連接
在這個(gè)包含多個(gè)部分的工業(yè)物聯(lián)網(wǎng)系列文章的第一部分,我們將分解和研究大型物聯(lián)網(wǎng)框架中邊緣節(jié)點(diǎn)檢測和測量能力的基本方面:檢測、測量、解讀和連接數(shù)據(jù),同時(shí)還將考慮功率管理和安全性。每個(gè)部分都將探討一組獨(dú)特的挑戰(zhàn)。邊緣節(jié)點(diǎn)的智能管理對(duì)成功實(shí)施來說十分關(guān)鍵。在一些情況下,超低功耗(ULP)是最重要的性能指標(biāo)。在關(guān)鍵事件期間,當(dāng)傳感器從睡眠模式喚醒時(shí),可以過濾掉絕大多數(shù)的潛在數(shù)據(jù)。
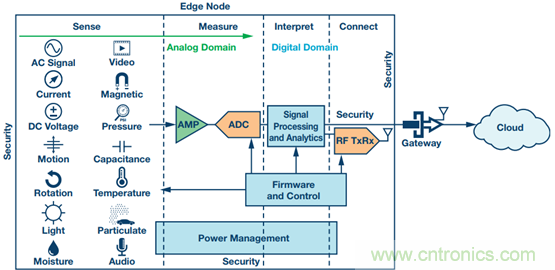
圖1. 邊緣節(jié)點(diǎn)器件智能地檢測、測量和解讀數(shù)據(jù)并將其連接至與云相連的互聯(lián)網(wǎng)網(wǎng)關(guān)。數(shù)據(jù)可以通過一些形式的分析進(jìn)行預(yù)處理,然后再傳輸以進(jìn)行更深的數(shù)據(jù)挖掘智能分析。
傳感器構(gòu)成工業(yè)物聯(lián)網(wǎng)電子生態(tài)系統(tǒng)的前端邊緣。測量階段將檢測到的信息轉(zhuǎn)換為有意義的數(shù)據(jù),如壓力、位移或旋轉(zhuǎn)的可量化值。在解讀階段,邊緣分析與處理會(huì)將測量數(shù)據(jù)轉(zhuǎn)換為可操作的事件。1 只有最有價(jià)值的信息才應(yīng)越過節(jié)點(diǎn)連接到云,以供預(yù)測或歷史處理。在整個(gè)信號(hào)鏈中,都可以根據(jù)初始的可接受性限制來抑制或過濾數(shù)據(jù)。理想情況下,傳感器節(jié)點(diǎn)應(yīng)僅發(fā)送絕對(duì)必要的信息,并且應(yīng)在獲得關(guān)鍵數(shù)據(jù)后盡快制定關(guān)鍵決策。
邊緣節(jié)點(diǎn)必須通過有線或無線傳感器節(jié)點(diǎn)(WSN)連接到外部網(wǎng)絡(luò)。在信號(hào)鏈的這一部分中,數(shù)據(jù)完整性仍然十分關(guān)鍵。如果通信不一致、丟失或損壞,則優(yōu)化檢測和測量數(shù)據(jù)幾乎沒有價(jià)值。通信期間數(shù)據(jù)丟失是不可接受的。存在電氣噪聲的工業(yè)環(huán)境可能十分惡劣和艱苦,尤其是在存在大量金屬物體情況下進(jìn)行射頻通信時(shí)。因此,必須在系統(tǒng)架構(gòu)設(shè)計(jì)期間預(yù)先設(shè)計(jì)魯棒的通信協(xié)議。
ULP系統(tǒng)的功率管理以選擇調(diào)節(jié)器元件來實(shí)現(xiàn)最大效率為起點(diǎn)。但是,由于邊緣節(jié)點(diǎn)也可能以快速占空比喚醒和睡眠,因此還應(yīng)考慮上電和掉電時(shí)間。外部觸發(fā)器或喚醒命令能夠幫助快速提醒邊緣節(jié)點(diǎn),使其開始檢測和測量數(shù)據(jù)。
數(shù)據(jù)安全性也是工業(yè)物聯(lián)網(wǎng)系統(tǒng)必須考慮的一個(gè)問題。我們不僅需要確保邊緣內(nèi)的數(shù)據(jù)安全無慮,還必須確保其對(duì)網(wǎng)絡(luò)網(wǎng)關(guān)的訪問免受惡意攻擊。決不允許仿冒邊緣節(jié)點(diǎn)來獲取網(wǎng)絡(luò)訪問以進(jìn)行不法活動(dòng)。
智能始于邊緣
邊緣處具有眾多檢測解決方案,這些解決方案可能不只是單個(gè)分立器件。邊緣可能存在多種不同的無關(guān)數(shù)據(jù)采集。溫度、聲音、振動(dòng)、壓力、濕度、運(yùn)動(dòng)、污染物、音頻和視頻只是其中可檢測的部分變量,這些數(shù)據(jù)會(huì)經(jīng)過處理并通過網(wǎng)關(guān)發(fā)送至云,以進(jìn)行進(jìn)一步的歷史和預(yù)測分析。
毫不夸張地說,傳感器就是工業(yè)物聯(lián)網(wǎng)的支柱。2 但更準(zhǔn)確的說法應(yīng)該是,它們是獲得洞察的中樞神經(jīng)系統(tǒng)。邊緣節(jié)點(diǎn)檢測和測量技術(shù)是目標(biāo)數(shù)據(jù)的"出生地"。如果在解決方案鏈的這一階段如實(shí)地記錄了不良或錯(cuò)誤的數(shù)據(jù),則云中再多的后期處理也無法挽回?fù)p失的價(jià)值。
任務(wù)關(guān)鍵型系統(tǒng)(如具有高風(fēng)險(xiǎn)結(jié)果的醫(yī)療保健和工廠停機(jī)監(jiān)控系統(tǒng))要求質(zhì)量數(shù)據(jù)測量具有魯棒的完整性。數(shù)據(jù)質(zhì)量至關(guān)重要。誤報(bào)或遺漏可能代價(jià)高昂,非常耗時(shí),甚至可能威脅生命。代價(jià)巨大的錯(cuò)誤最終會(huì)導(dǎo)致計(jì)劃外的維護(hù)、勞動(dòng)力使用效率低下,甚至不得不禁用整個(gè)物聯(lián)網(wǎng)系統(tǒng)。智能始于邊緣節(jié)點(diǎn),而此處也適用那句老話:如果輸入的是垃圾,那么輸出的也一定是垃圾。
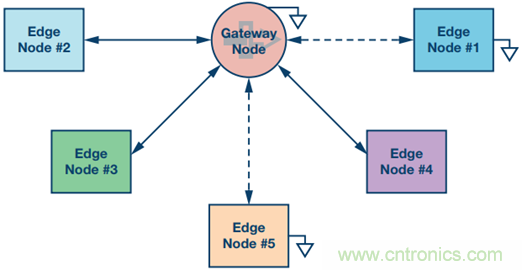
圖2. 很多有線和無線邊緣節(jié)點(diǎn)輸出可自主連接到網(wǎng)關(guān)節(jié)點(diǎn),以便在傳輸至云服務(wù)器之前進(jìn)行聚合。
能夠訪問數(shù)據(jù)寶藏也就意味著需要承擔(dān)重大的責(zé)任
在沒有邊緣節(jié)點(diǎn)智能的傳統(tǒng)信號(hào)鏈解決方案中,數(shù)據(jù)只是數(shù)據(jù)。非智能節(jié)點(diǎn)從不會(huì)幫助生成用于制定可行決策的智慧和知識(shí)。1 可能存在大量對(duì)系統(tǒng)目標(biāo)性能沒有影響的原始低質(zhì)量數(shù)據(jù)。3 轉(zhuǎn)換所有這些數(shù)據(jù)并將其發(fā)送至最終云存儲(chǔ)目的地可能需要消耗大量的功率和帶寬。
相比之下,聰明的智能分區(qū)邊緣節(jié)點(diǎn)檢測和測量會(huì)將數(shù)據(jù)轉(zhuǎn)換為可付諸行動(dòng)的信息。智能節(jié)點(diǎn)可降低整體功耗,縮短延遲并減少帶寬浪費(fèi)。4 這使得具有較長延遲的反應(yīng)型物聯(lián)網(wǎng)可以轉(zhuǎn)變成實(shí)時(shí)的預(yù)測型物聯(lián)網(wǎng)模式。物聯(lián)網(wǎng)仍然適用基本的模擬信號(hào)鏈電路設(shè)計(jì)理念。對(duì)于復(fù)雜的系統(tǒng),通常需要擁有深厚的應(yīng)用專業(yè)知識(shí)來解讀已處理的數(shù)據(jù)。
優(yōu)化的智能分區(qū)最大程度地提升了云價(jià)值
只有最重要的測量信息才需要通過網(wǎng)關(guān)發(fā)送至云端以進(jìn)行最終處理。在一些情況下,大多數(shù)數(shù)據(jù)根本不重要。5 但是,對(duì)于本地實(shí)時(shí)決策所需的時(shí)間關(guān)鍵型系統(tǒng)數(shù)據(jù),應(yīng)在將其聚合到可進(jìn)行遠(yuǎn)程訪問的遠(yuǎn)端節(jié)點(diǎn)之前及早依其行事。相反,通過預(yù)測模型利用歷史值來影響長期洞察的信息是云處理的理想應(yīng)用。通過將數(shù)據(jù)歸檔到龐大的數(shù)據(jù)庫以供追溯處理和決策使用,發(fā)揮出了云處理和存儲(chǔ)的強(qiáng)大優(yōu)勢。6
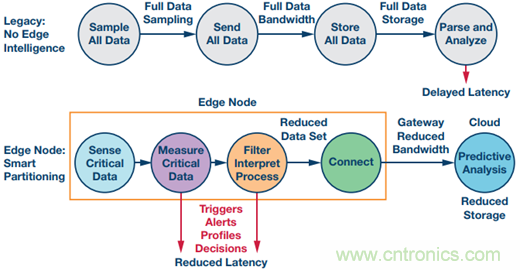
圖3. 邊緣節(jié)點(diǎn)的智能分區(qū)解決了以前無法解決的新挑戰(zhàn)。信號(hào)鏈中更早的精簡處理和智能實(shí)現(xiàn)了更高效的整體物聯(lián)網(wǎng)解決方案。
實(shí)時(shí)決策依賴于邊緣
物聯(lián)網(wǎng)傳感器主要為模擬傳感器。具體的工業(yè)應(yīng)用要求將決定邊緣節(jié)點(diǎn)前端所需傳感器的動(dòng)態(tài)范圍和帶寬。在將信號(hào)轉(zhuǎn)換為數(shù)字表示并傳輸?shù)竭吘壨獠壳?,信?hào)鏈的前端將處于模擬域內(nèi)。如果選擇不當(dāng),模擬信號(hào)鏈中的各個(gè)元件都有可能限制邊緣節(jié)點(diǎn)的整體性能。動(dòng)態(tài)范圍將為目標(biāo)滿量程傳感器相對(duì)于本底噪聲或下個(gè)最高無用信號(hào)的差值。
由于物聯(lián)網(wǎng)傳感器通常會(huì)同時(shí)尋找已知和未知活動(dòng),因此模擬濾波器并非始終有意義。數(shù)字濾波會(huì)在對(duì)信號(hào)進(jìn)行采樣后執(zhí)行。除非在傳感器的前端使用模擬濾波器,否則基波的諧波或其他雜散信號(hào)可能混入檢測的信息并與目標(biāo)信號(hào)競爭功率。因此,在設(shè)計(jì)階段應(yīng)該針對(duì)時(shí)域和頻域中的意外檢測信號(hào)制定應(yīng)對(duì)計(jì)劃,防止干擾偽像出現(xiàn)在測量數(shù)據(jù)中。
檢測到的信息通常由信號(hào)鏈中接下來的ADC進(jìn)行測量。如果使用分立元件來設(shè)計(jì)物聯(lián)網(wǎng)邊緣節(jié)點(diǎn),則在選擇測量ADC時(shí)應(yīng)該注意不要減小傳感器的動(dòng)態(tài)范圍。嵌入式ADC的輸入滿量程范圍通常與傳感器輸出幅度匹配良好。理想情況下,傳感器輸出應(yīng)消耗幾乎整個(gè)ADC輸入范圍(在1 dB內(nèi)),而不使ADC發(fā)生飽和,也不會(huì)在范圍限制處被裁減掉。但是,也可以使用放大器級(jí)來對(duì)傳感器輸出信號(hào)進(jìn)行增益或衰減,以便使ADC自身的動(dòng)態(tài)范圍達(dá)到最大。ADC滿量程輸入、采樣率、位分辨率、輸入帶寬和噪聲密度都會(huì)影響邊緣節(jié)點(diǎn)的信號(hào)測量性能。
前端放大器可以嵌入在節(jié)點(diǎn)的測量級(jí)或作為分立元件置于ADC前。放大器的增益、帶寬和噪聲也可以增強(qiáng)邊緣節(jié)點(diǎn)的性能。
信號(hào)鏈中傳感器之后的測量ADC通常采用以下兩種采樣架構(gòu)類型之一:奈奎斯特速率或連續(xù)時(shí)間 -
(CTSD),其中后者在嵌入式ADC中更為常見。奈奎斯特速率ADC具有等于采樣率頻率一半(即fs/2)的平坦標(biāo)稱噪底。CTSD結(jié)合使用過采樣率和陷波通帶,使噪聲超出目標(biāo)帶寬,從而增加動(dòng)態(tài)范圍。在了解邊緣節(jié)點(diǎn)的模擬帶寬和動(dòng)態(tài)范圍時(shí),測量ADC架構(gòu)及其分辨率非常關(guān)鍵。
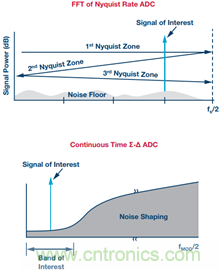
圖4. 如果物聯(lián)網(wǎng)傳感器上沒有前端模擬濾波器,奈奎斯特速率ADC會(huì)將超出第一奈奎斯特區(qū)域的高階頻率折疊回目標(biāo)帶寬中。相比之下,具有過采樣調(diào)制時(shí)鐘的CTSD ADC架構(gòu)使用噪聲整形來在目標(biāo)頻段中實(shí)現(xiàn)高動(dòng)態(tài)范圍。由于CTSD具有固有濾波能力,因此對(duì)信號(hào)混疊不太敏感。
例如,在頻域中,1 Hz單位帶寬的噪聲密度將基于ADC的SNR以及噪聲在ADC采樣頻譜上的分布寬度。在奈奎斯特速率ADC中,噪聲頻譜密度(每1 Hz帶寬)為0 dB – ADC信噪比(SNR) – 10 × log(fs/2),其中fs/2為采樣率除以二或ADC的單個(gè)奈奎斯特區(qū)域。理想SNR的計(jì)算公式為SNR = 6.02 × N + 1.76 dB,其中N為ADC位數(shù)。但是,ADC的實(shí)際SNR涉及到晶體管和半導(dǎo)體處理的非理想因素,這包括電氣噪聲和晶體管級(jí)元件瑕疵。這些非理想因素會(huì)導(dǎo)致SNR性能降到理想性能以下,因此請(qǐng)查閱ADC數(shù)據(jù)手冊(cè)以了解SNR目標(biāo)性能。
邊緣節(jié)點(diǎn)的動(dòng)態(tài)范圍將由傳感器的動(dòng)態(tài)范圍、信號(hào)的放大率(如果需要)和ADC滿量程動(dòng)態(tài)范圍組成。如果傳感器的滿量程輸出信號(hào)未達(dá)到ADC滿量程范圍輸入的1 dB以內(nèi),則ADC的部分動(dòng)態(tài)范圍將會(huì)閑置。相反,如果來自傳感器的輸入超出ADC的量程,則會(huì)造成采樣的信號(hào)失真。在計(jì)算邊緣節(jié)點(diǎn)的動(dòng)態(tài)范圍時(shí),放大器帶寬、增益和噪聲也是需要考慮的一部分。傳感器、放大器和ADC的總電氣噪聲將為各RMS分量的平方和的平方根。7
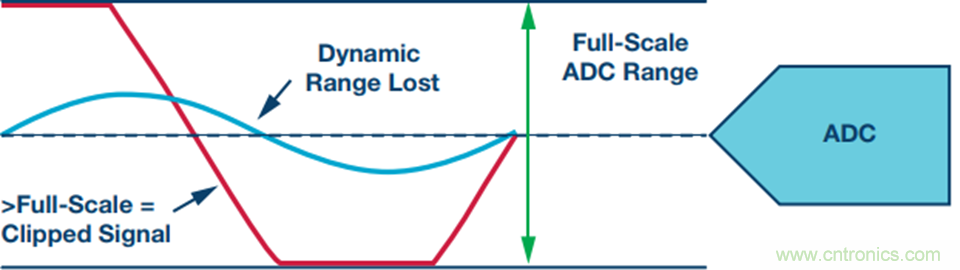
圖5. 傳感器信號(hào)輸出幅度與ADC的輸入滿量程不匹配而出現(xiàn)動(dòng)態(tài)范圍丟失(藍(lán)色)的示例。需要使用放大器最大程度地增大傳感器的動(dòng)態(tài)范圍,同時(shí)防止ADC發(fā)生飽和(紅色)。信號(hào)匹配必須考慮整個(gè)邊緣節(jié)點(diǎn)信號(hào)鏈的帶寬、動(dòng)態(tài)范圍和噪聲。
智能工廠
在工業(yè)物聯(lián)網(wǎng)中,機(jī)器振動(dòng)狀態(tài)監(jiān)控將會(huì)是一項(xiàng)非常重要的應(yīng)用。新型或傳統(tǒng)機(jī)器設(shè)備可能擁有多個(gè)關(guān)鍵的機(jī)械元件,例如轉(zhuǎn)軸或齒輪,這些元件可能裝有高動(dòng)態(tài)范圍的MEMS加速度計(jì)。8 這些多軸傳感器將對(duì)機(jī)械的振動(dòng)位移進(jìn)行實(shí)時(shí)采樣。測量后,振動(dòng)信號(hào)可以進(jìn)行處理并與理想的機(jī)器配置進(jìn)行比較。9 在工廠中,通過分析這類信息,可以幫助提高效率、減少停機(jī)情況并提前預(yù)測機(jī)械故障。在極端情況下,可迅速關(guān)閉機(jī)械元件正在急劇惡化的機(jī)器,從而避免造成進(jìn)一步的損壞。
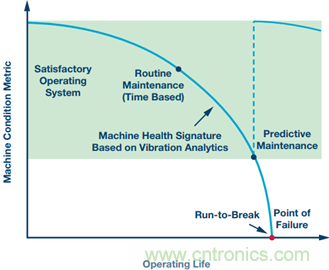
圖6. 雖然可以定期執(zhí)行例行機(jī)器維護(hù),但這通常不是根據(jù)機(jī)器狀況而智能進(jìn)行的。10 通過分析特定機(jī)器操作的振動(dòng)性能,可在邊緣節(jié)點(diǎn)處發(fā)出預(yù)測故障點(diǎn)和維護(hù)里程碑警告。
通過實(shí)現(xiàn)邊緣節(jié)點(diǎn)分析,可以顯著縮短決策時(shí)間延遲。圖7顯示了這樣的一個(gè)示例,在這個(gè)示例中,在超出MEMS傳感器警告閾值限制后,系統(tǒng)立即發(fā)送了警告。如果事件極其嚴(yán)重而被認(rèn)定為關(guān)鍵事件,可授權(quán)節(jié)點(diǎn)自動(dòng)禁用違規(guī)設(shè)備,以防止發(fā)生非常耗時(shí)的災(zāi)難性機(jī)械故障。
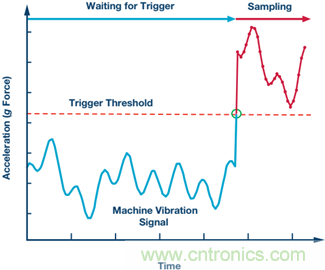
圖7. 機(jī)器振動(dòng)采樣數(shù)據(jù)的時(shí)域表示,其中比較器閾值可決定是否將檢測和測量數(shù)據(jù)傳送到邊緣以外。系統(tǒng)可保持低功耗狀態(tài)以過濾大部分信息,直到通過閾值交叉事件實(shí)現(xiàn)數(shù)據(jù)優(yōu)勢為止。
或者,可以調(diào)用觸發(fā)信號(hào)以使能另一個(gè)檢測和測量節(jié)點(diǎn)(如備用機(jī)器元件上的節(jié)點(diǎn)),以便開始根據(jù)第一個(gè)事件來解讀數(shù)據(jù)。這樣可以減少來自邊緣節(jié)點(diǎn)的采樣數(shù)據(jù)總量。要確定相對(duì)于標(biāo)稱值的任何振動(dòng)異常,前端節(jié)點(diǎn)在設(shè)計(jì)上必須達(dá)到所需的檢測性能。檢測和測量電路的動(dòng)態(tài)范圍、采樣率和輸入帶寬應(yīng)該足以識(shí)別任何偏移事件。
智慧城市
另一種工業(yè)物聯(lián)網(wǎng)邊緣節(jié)點(diǎn)應(yīng)用為具有嵌入式視頻分析的智慧城市工業(yè)攝像機(jī)。根據(jù)智慧城市的定義,城市的使命是將無數(shù)的信息和通信點(diǎn)匯聚到一個(gè)凝聚的系統(tǒng)中,以實(shí)現(xiàn)對(duì)城市資產(chǎn)的管理。一種常見的應(yīng)用是提供停車位空缺提醒和占用檢測。調(diào)試期間會(huì)為各攝像機(jī)預(yù)先確定視場。分析機(jī)制中可以定義和使用邊界邊緣檢測來識(shí)別各種對(duì)象及其運(yùn)動(dòng)。在邊緣處,不僅可以分析對(duì)象的歷史運(yùn)動(dòng),還可使用數(shù)字信號(hào)處理(DSP)算法來根據(jù)對(duì)象軌跡計(jì)算預(yù)測的路徑。

圖8. 利用邊緣節(jié)點(diǎn)視頻分析,可在低功耗系統(tǒng)中確定對(duì)象類型檢測、軌跡和邊界交叉,而無需將全帶寬視頻數(shù)據(jù)發(fā)送至云端進(jìn)行分析。只需傳輸時(shí)間戳及痕跡對(duì)象坐標(biāo)和類型。
在類似的頻率濾波中,終端處理通常不需要全帶寬的視頻分析幀。通常,不用于安全目的時(shí),只需要完整視頻幀的一小部分。在固定安裝的攝像機(jī)上,幀與幀之間的大部分可視數(shù)據(jù)為靜態(tài)數(shù)據(jù)。靜態(tài)數(shù)據(jù)可以過濾掉。在一些情況下,只需要分析目標(biāo)對(duì)象的邊界交叉數(shù)或運(yùn)動(dòng)坐標(biāo)??s減的信息子集可以采用痕跡坐標(biāo)的形式傳輸至信號(hào)鏈中的下一網(wǎng)關(guān)。
邊緣節(jié)點(diǎn)視頻分析可提供多種濾波解讀來區(qū)分各種對(duì)象類型,例如汽車、卡車、自行車、人類和動(dòng)物等。這種抽取操作減少了云服務(wù)器上所需的數(shù)據(jù)帶寬和計(jì)算能力,而如果要分析下游發(fā)送的全幀速率視頻數(shù)據(jù),則會(huì)占用大量的數(shù)據(jù)帶寬和計(jì)算能力。
室內(nèi)攝像機(jī)應(yīng)用可以識(shí)別穿過入口邊界的人數(shù),還可調(diào)整房間的照明、加熱或制冷。要在極端照明條件或其他具有挑戰(zhàn)性的照明條件(如降雨)下實(shí)現(xiàn)視覺有效性,室外攝像機(jī)可能需要具有高動(dòng)態(tài)范圍。每像素8位或10位的典型成像傳感器可能無法在所有檢測情形中的照明條件下,提供足夠的亮度動(dòng)態(tài)范圍。相較于以240 Hz的刷新速率查看快速運(yùn)動(dòng),工業(yè)分析攝像機(jī)上可以使用較慢的幀速率來監(jiān)控活動(dòng)。

圖9. 通過在邊緣節(jié)點(diǎn)處部署采用DSP對(duì)象檢測算法的高動(dòng)態(tài)范圍成像器,即使在低照明條件下,也可以確定運(yùn)動(dòng)和邊界入侵。這個(gè)示例使用視覺對(duì)比來定義室內(nèi)工廠/辦公室(左側(cè))和室外停車場(右側(cè))的邊緣檢測。
平臺(tái)級(jí)解決方案
ADT7420 是一款具有突破性性能的4 mm × 4 mm數(shù)字溫度傳感器,內(nèi)置16位ADC,分辨率可達(dá)0.0078°C,功耗僅為210
A。ADXL362是一款超低功耗、3軸MEMS加速度計(jì),在運(yùn)動(dòng)觸發(fā)喚醒模式下,以100 Hz采樣速率工作時(shí)功耗僅為2
A。它不使用功率占空比,而是在所有數(shù)據(jù)速率下均采用全帶寬架構(gòu),從而防止了輸入信號(hào)混疊。ADIS16229是一款具有嵌入式射頻收發(fā)器的雙軸18 g數(shù)字MEMS振動(dòng)傳感器。它還通過512點(diǎn)數(shù)字FFT能力提供了片上頻域信號(hào)處理功能。
支持DSP的Black
n低功耗成像平臺(tái)(BLIP)11可基于成熟的數(shù)字信號(hào)處理工具實(shí)現(xiàn)工業(yè)視覺設(shè)計(jì)的快速原型制作。優(yōu)化的軟件庫為設(shè)備制造商提供了用于運(yùn)動(dòng)檢測、人數(shù)統(tǒng)計(jì)和車輛檢測的開箱即用解決方案。
參考電路
1 Colm Prendergast. "互聯(lián)世界中的智能分區(qū)和價(jià)值創(chuàng)造" 。物聯(lián)網(wǎng)專題演講:2015 IESA視覺峰會(huì)。
2 Stephen Lawson. "物聯(lián)網(wǎng)不斷將分析能力推向邊緣." PCWorld: IDG News Service, 2016年。
3 Lisa Morgan. "邊緣分析——物聯(lián)網(wǎng)數(shù)據(jù)洪流的解藥." InformationWeek: UBM Electronics, 2016年。
4 Daniel Kirsch. "邊緣分析的價(jià)值." Hurwitz & Associates Services, 2015年。
5 Jason Stamper. 物聯(lián)網(wǎng)將分析能力驅(qū)動(dòng)至網(wǎng)絡(luò)邊緣的原因. 451 Research, 2015年。
6 Steve Nelson. "端到端探索物聯(lián)網(wǎng)." Element14: Newark Electronics, 2014年。
7 Umesh Jayamohan. "了解放大器噪聲對(duì)ADC信號(hào)鏈中總噪聲的影響." 模擬對(duì)話,2013年2月。
8 Robert Randall,"基于振動(dòng)的狀態(tài)監(jiān)控"。澳大利亞新南威爾士州:新南威爾士大學(xué),2010年。
9 Ed Spence. "利用MEMS加速度計(jì)的優(yōu)勢進(jìn)行狀態(tài)監(jiān)控." Electronic Design,Penton Publishing,2016年。
10 Jamie Smith,"用于工業(yè)物聯(lián)網(wǎng)的智能邊緣設(shè)備"。ARC工業(yè)論壇,2015年
11 Black
n低功耗成像平臺(tái)(BLIP)。ADI公司,2014年。
本文轉(zhuǎn)載自亞德諾半導(dǎo)體。
推薦閱讀:
