
【導(dǎo)讀】本文講解的智能機(jī)器人紅外發(fā)送接收電路設(shè)計(jì),采用了藍(lán)牙無(wú)線通信技術(shù),設(shè)計(jì)主體為一輪式移動(dòng)小車(chē)機(jī)器人,擁有跟隨主人行走、播放音樂(lè)、遙控運(yùn)行、彩燈隨拍手頻率閃爍以及家庭安防等多項(xiàng)功能。
該移動(dòng)音樂(lè)機(jī)器人以英飛凌16 位單片機(jī)XE162FN 處理器為核心,英飛凌開(kāi)發(fā)的16/32 位微控制器具有高度系統(tǒng)集成、無(wú)需外設(shè)附加器件及相關(guān)軟件開(kāi)銷(xiāo)、提供系統(tǒng)安全和故障保護(hù)機(jī)制等功能。藍(lán)牙是一種全球開(kāi)放性的、低成本的無(wú)線通信規(guī)范。另外,由于藍(lán)牙具有傳輸距離遠(yuǎn),抗干擾能力強(qiáng)、功耗低、傳輸速率高的優(yōu)點(diǎn),設(shè)計(jì)采用了藍(lán)牙無(wú)線通信技術(shù),設(shè)計(jì)主體為一輪式移動(dòng)小車(chē)機(jī)器人,擁有跟隨主人行走、播放音樂(lè)、遙控運(yùn)行、彩燈隨拍手頻率閃爍以及家庭安防等多項(xiàng)功能。機(jī)器人的移動(dòng)采用驅(qū)動(dòng)直流電機(jī)帶動(dòng)輪子轉(zhuǎn)動(dòng)實(shí)現(xiàn),跟隨主人行走的功能由紅外發(fā)射與接收來(lái)判斷主人手中的手持設(shè)備和移動(dòng)音樂(lè)機(jī)器人之間的方位,進(jìn)而驅(qū)動(dòng)機(jī)器人跟隨主人行走。
無(wú)線遙控運(yùn)行由藍(lán)牙通信實(shí)現(xiàn)。在安防功能上,該移動(dòng)音樂(lè)機(jī)器人配備了典型的用于檢測(cè)火災(zāi)的煙霧傳感器,并且如果檢測(cè)到有煙霧或者煤氣泄露時(shí),本地聲音報(bào)警以及通過(guò) GSM 無(wú)線網(wǎng)絡(luò)控制短信發(fā)送模塊發(fā)送報(bào)警短信給指定的手機(jī)號(hào)碼。GSM 網(wǎng)絡(luò)是在蜂窩系統(tǒng)的基礎(chǔ)上發(fā)展而來(lái)的一種無(wú)線數(shù)字網(wǎng)絡(luò)標(biāo)準(zhǔn),具有網(wǎng)絡(luò)容量大、業(yè)務(wù)種類(lèi)齊全、信號(hào)穩(wěn)定性強(qiáng)、具有較高的保密性和安全性以及靈活的切換處理和自動(dòng)漫游功能等眾多優(yōu)點(diǎn)。在手持設(shè)備的設(shè)計(jì)上,配備了一塊320*240 的觸摸屏以實(shí)現(xiàn)直觀方便的無(wú)按鍵遙控控制,以及一個(gè)加速度傳感器感知傾斜角度從而控制機(jī)器人運(yùn)動(dòng)。
接收電路
系統(tǒng)的智能跟隨功能是通過(guò)紅外實(shí)現(xiàn)的,音樂(lè)機(jī)器人上的紅外接收器感知到紅外線時(shí),會(huì)追蹤紅外發(fā)射源,感知不到時(shí),會(huì)原地旋轉(zhuǎn)重新搜索紅外發(fā)射源,直至 重新 定位方向。紅外發(fā)射源是由10 個(gè)紅外發(fā)射管組成,將10 個(gè)紅外發(fā)射管均勻擺放在一個(gè)球體表面,使得紅外發(fā)射源可以向四面八方輻射紅外線,保證音樂(lè)機(jī)器人更加快速準(zhǔn)確地尋找到紅外發(fā)射源。紅外發(fā)射管發(fā)射的載波頻 率為38 kHz 占空比為50%的方波。紅外的發(fā)射和接收電路如圖1所示,10.0 連接一個(gè)普通I/O 引腳,控制紅外線的通斷,即接通4 ms,然后關(guān)斷11 ms,反復(fù)進(jìn)行接通與關(guān)斷。 連接一路PWM 方波,方波的頻率是38 kHz.一共有10 路紅外發(fā)射管。
紅外接收裝置采用2 個(gè)紅外接收器1838,分別安裝在音樂(lè)機(jī)器人的頭部和尾部。兩個(gè)接收器的輸出引腳分別連接單片機(jī)的10.2 和10.7 引腳。紅外接收器1838 對(duì)38 kHz 頻率的紅外線敏感,所以紅外接收器1838 可以檢測(cè)到紅外發(fā)射源的方位,從而驅(qū)動(dòng)電機(jī)向外發(fā)射源的方向前進(jìn)。
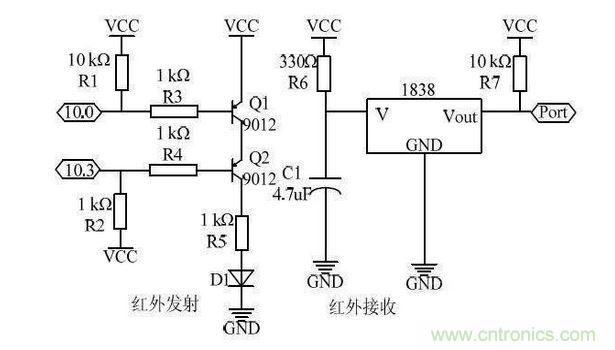
圖1智能跟隨紅外發(fā)送接收電路
拍手信號(hào)捕獲電路設(shè)計(jì)
拍手彩燈功能的實(shí)現(xiàn)主要分為拍手信號(hào)的捕獲和彩燈的旋轉(zhuǎn)點(diǎn)亮,彩燈的旋轉(zhuǎn)點(diǎn)亮較為簡(jiǎn)單,但拍手信號(hào)捕獲上由于拍手產(chǎn)生的信號(hào)不是標(biāo)準(zhǔn)的階躍信號(hào),當(dāng)用示波器進(jìn)行波形的觀察時(shí),實(shí)際上波形在上升沿和下降沿的地方出現(xiàn)比較多的毛刺,也就是說(shuō)一次拍手信號(hào)產(chǎn)生了多次階躍信號(hào)。如果單片機(jī)記錄2 次上升沿的時(shí)間間隔時(shí),由于毛刺的存在,使得單片機(jī)錯(cuò)誤的將毛刺當(dāng)做上升沿而捕捉,造成兩次上升沿的時(shí)間間隔的變小。解決的辦法是利用包絡(luò)檢測(cè)電路進(jìn)行包絡(luò)檢測(cè),再通過(guò)電壓比較器選取合適的比較電壓值,從而產(chǎn)生比較理想的階躍信號(hào),即一次拍手產(chǎn)生一次階躍信號(hào)。
電路利用麥克風(fēng)采集聲音信號(hào),然后利用LM324對(duì)采集來(lái)的信號(hào)進(jìn)行比例放大,放大的比例為100 倍,然后接過(guò)兩個(gè)1N5819 和一個(gè)104 獨(dú)石電容進(jìn)行包絡(luò)線檢測(cè),最后利用LM358作為電壓比較器,利用1 K 電阻和880Ω電阻分壓獲得比較電壓值,其電路如圖2 所示。機(jī)器人的移動(dòng)采用驅(qū)動(dòng)直流電機(jī)帶動(dòng)輪子轉(zhuǎn)動(dòng)實(shí)現(xiàn),即控制直流電機(jī)的正反轉(zhuǎn)和速度,系統(tǒng)直流電機(jī)驅(qū)動(dòng)芯片采用SGS 公司的L298N,內(nèi)部有4 通道邏輯驅(qū)動(dòng)電路。用三極管組成H 型平衡橋,驅(qū)動(dòng)功率大,驅(qū)動(dòng)能力強(qiáng)。同時(shí)H 型PWM 電路工作在晶體管的飽和狀態(tài)與截止?fàn)顟B(tài),具有非常高的效率。
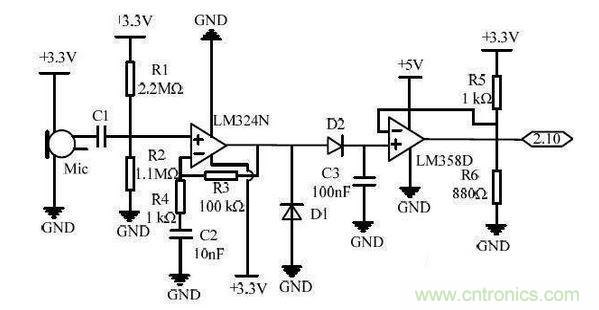
圖2 拍手信號(hào)捕獲電路
直流電機(jī)驅(qū)動(dòng)電路設(shè)計(jì)
電機(jī)的轉(zhuǎn)速取決于3 個(gè)因素:負(fù)載、電壓和電流。對(duì)于一個(gè)給定的負(fù)載,可以通過(guò)脈沖寬度調(diào)制的方法來(lái)使電機(jī)保持穩(wěn)定的速度。通過(guò)改變施加在直流電機(jī)上的脈沖寬度,可以增加或減小電機(jī)的轉(zhuǎn)速。調(diào)整脈沖寬度,即改變占空比,調(diào)整電機(jī)的速度。驅(qū)動(dòng)板采用6 個(gè)高速光耦6N137實(shí)現(xiàn)驅(qū)動(dòng)電路與邏輯電路的隔離,這樣可以有效地避免驅(qū)動(dòng)電路與邏輯電路之間的相互干擾。驅(qū)動(dòng)板的電路原理圖如圖3所示。
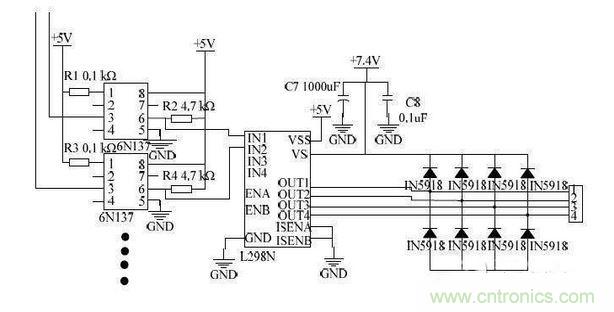
圖3 直流電機(jī)驅(qū)動(dòng)電路
通過(guò)軟件編程可以自由改變單片機(jī)兩路PWM脈沖信號(hào)的占空比,電機(jī)的A 端連接PWM 脈沖信號(hào),電機(jī)的B 端連接單片機(jī)的一個(gè)I/O 引腳。當(dāng)這個(gè)I/O 引腳置1 時(shí),電流從電機(jī)的B 端流向電機(jī)的A 端;當(dāng)這個(gè)I/O 引腳置0 時(shí),電流從電機(jī)的A 端流向電機(jī)的B 端,這樣電機(jī)就可以改變電機(jī)旋轉(zhuǎn)方向,同時(shí)控制PWM 脈沖信號(hào)的占空比值還可以改變電機(jī)旋轉(zhuǎn)速度,實(shí)現(xiàn)轉(zhuǎn)向和轉(zhuǎn)速的控制。



