【導(dǎo)讀】毫米波技術(shù)炙手可熱,對(duì)于毫米波,小編也從帶來諸多介紹,如5G毫米波、毫米波雷達(dá)等。但對(duì)于毫米波末制導(dǎo)雷達(dá)頻域高分辨測角,小編卻未曾講解。因此,本文中將對(duì)毫米波此部分相關(guān)內(nèi)容予以介紹。如果你對(duì)本文即將要闡述的問題有所興趣,不妨繼續(xù)往下閱讀哦。
毫米波技術(shù)炙手可熱,對(duì)于毫米波,小編也從帶來諸多介紹,如5G毫米波、毫米波雷達(dá)等。但對(duì)于毫米波末制導(dǎo)雷達(dá)頻域高分辨測角,小編卻未曾講解。因此,本文中將對(duì)毫米波此部分相關(guān)內(nèi)容予以介紹。如果你對(duì)本文即將要闡述的問題有所興趣,不妨繼續(xù)往下閱讀哦。
0 引 言
精確制導(dǎo)技術(shù)是精確制導(dǎo)武器的關(guān)鍵技術(shù),其重點(diǎn)在于研究確保尋的武器在復(fù)雜戰(zhàn)場環(huán)境中命中目標(biāo)乃至命中目標(biāo)要害部位的尋的末制導(dǎo)技術(shù)。隨著導(dǎo)彈尋的精確制導(dǎo)技術(shù)的發(fā)展,當(dāng)雷達(dá)尋的器接近目標(biāo)時(shí),目標(biāo)角閃爍已成為微波/毫米波雷達(dá)尋的器跟蹤誤差的主要來源,特別是當(dāng)跟蹤大的擴(kuò)展目標(biāo)時(shí),目標(biāo)角閃爍已成為提高末制導(dǎo)雷達(dá)精度的主要障礙。因此,抑制角閃爍,提高末制導(dǎo)雷達(dá)的測角精度是末制導(dǎo)雷達(dá)的一項(xiàng)關(guān)鍵技術(shù)。
經(jīng)典的抑制角閃爍常用的方法是根據(jù)不同的雷達(dá)體制和應(yīng)用背景,在不同的空間、頻率和極化方式上對(duì)目標(biāo)的后向散射回波進(jìn)行分集接收和濾波處理。近年來,隨著寬帶雷達(dá)的發(fā)展和應(yīng)用,基于距離高分辨距離像的單脈沖測角技術(shù)在抑制角閃爍方面具有較大的潛力和應(yīng)用前景。本文提出的基于頻域高分辨的測角算法應(yīng)用于毫米波PD體制末制導(dǎo)雷達(dá),是在系統(tǒng)多普勒分辨率滿足一定的條件下,對(duì)目標(biāo)回波進(jìn)行頻域高分辨成像,在和通道中實(shí)現(xiàn)目標(biāo)散射中心頻域單元的檢測,對(duì)檢測出的頻域單元分別求出相應(yīng)的方位角和俯仰角,經(jīng)過一定的濾波處理,得到目標(biāo)的徑向幾何中心的空間角度。仿真結(jié)果表明該頻域高分辨測角技術(shù)可以有效提高末制導(dǎo)雷達(dá)的測角精度。
1 頻域高分辨原理
當(dāng)導(dǎo)彈與目標(biāo)存在相對(duì)徑向運(yùn)動(dòng)時(shí),產(chǎn)生多普勒效應(yīng)。對(duì)于主動(dòng)末制導(dǎo)雷達(dá),點(diǎn)目標(biāo)回波的多普勒頻率為:
式中:Vr(t)為彈目相對(duì)徑向速度;λ為發(fā)射信號(hào)的波長。目標(biāo)的不同部位與導(dǎo)彈的相對(duì)速度是不一樣的,不同部位對(duì)應(yīng)的回波多普勒頻率也不同。對(duì)于毫米波雷達(dá)而言,其目標(biāo)特性處于光學(xué)區(qū),由于目標(biāo)的尺寸遠(yuǎn)大于雷達(dá)發(fā)射信號(hào)的波長,目標(biāo)可以看成是由多個(gè)散射中心組成的擴(kuò)展目標(biāo)。當(dāng)導(dǎo)引頭的視線與目標(biāo)之間存在夾角時(shí),擴(kuò)展目標(biāo)不同部位散射中心的速度方向與雷達(dá)視線方向不同,進(jìn)而使得各個(gè)散射中心的多普勒頻率也存在差異。如果雷達(dá)系統(tǒng)的頻域分辨率滿足要求,就可以分辨出體目標(biāo)的各個(gè)強(qiáng)散射點(diǎn)的多普勒頻率,則在頻域上可以得到體目標(biāo)上各個(gè)散射點(diǎn)的多普勒頻率信息,從而獲得頻域高分辨一維像。
2 頻域高分辨測角算法
2.1 振幅和差單脈沖測角原理
單脈沖雷達(dá)屬于同時(shí)波瓣法測角。雷達(dá)天線在一個(gè)角平面內(nèi)有兩個(gè)部分重疊的波束,振幅和差單脈沖雷達(dá)取得角誤差信號(hào)的基本方法是這兩個(gè)波束同時(shí)收到的信號(hào)進(jìn)行和、差波束處理,分別得到和信號(hào)、差信號(hào),其中差信號(hào)就是該角平面內(nèi)的誤差信號(hào)。
以方位平面為例,假定兩個(gè)波束的方向性函數(shù)完全相同,設(shè)為F(θ),兩波束收到的信號(hào)電壓振幅分別為E1,E2,兩波束各自相對(duì)天線軸線的偏角為δ,則對(duì)于偏離天線軸線θ角方向的目標(biāo),其和信號(hào)振幅為:
其中:F2∑(θ)為發(fā)射和波束方向性函數(shù),而F(δ一θ)+F(δ+θ)為接收和波束方向性函數(shù),它與發(fā)射和波束方向性函數(shù)完全相同;A為比例系數(shù)。
差信號(hào)的振幅為:
其中:F△=F(δ-θ)一F(δ+θ)為接收差波束方向性函數(shù)。
假定目標(biāo)的誤差角為ε,則差信號(hào)振幅可表示為:
由于ε比較小,對(duì)F△(ε)做泰勒級(jí)數(shù)可表示為F′△(0)ε,那么:
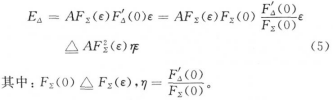
所以,在一定的誤差角范圍內(nèi),差信號(hào)的振幅大小與誤差角ε成正比。差信號(hào)的相位表明目標(biāo)偏離天線軸線的方向,所以誤差角可以表示為:

其中,當(dāng)差信號(hào)與和信號(hào)同相時(shí),ψ取O,反之取π。
2.2 頻域高分辨測角算法
PD雷達(dá)有三個(gè)回波接收通道,分別為和通道、方位通道和俯仰通道,記為E,△f,△y,對(duì)三個(gè)通道分別作FFT處理,獲得三通道的頻域高分辨一維像。對(duì)和通道一維像進(jìn)行目標(biāo)檢測,可以獲得強(qiáng)散射點(diǎn)的多普勒位置信息,然后根據(jù)單脈沖偏軸測角原理,可得到各散射點(diǎn)的方位角誤差εfi和俯仰角誤差εyi:
對(duì)各散射點(diǎn)的角誤差進(jìn)行濾波處理,可得到目標(biāo)幾何中心的角誤差,即:
其中,ai,βi為加權(quán)系數(shù)。
3 仿真實(shí)驗(yàn)
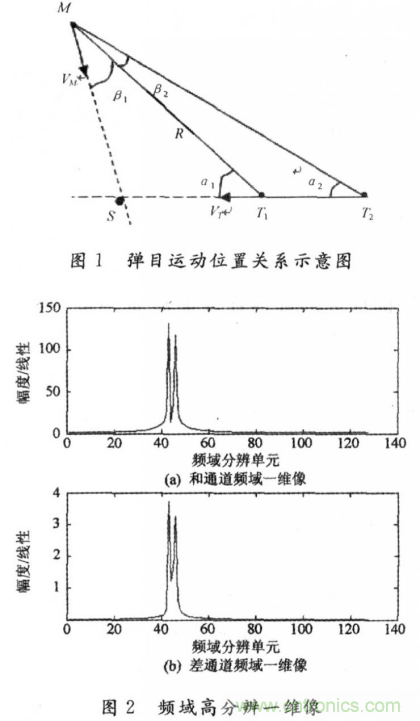
為了驗(yàn)證算法的有效性,進(jìn)行仿真實(shí)驗(yàn)。導(dǎo)彈和目標(biāo)的位置關(guān)系如圖1所示。導(dǎo)彈運(yùn)動(dòng)速度VM為450 m/s,目標(biāo)的運(yùn)動(dòng)速度VT為1 000 m/s。α1為30°,目標(biāo)長度為20 m,取頭、尾兩個(gè)散射中心,則頻域高分辨一維像如圖2所示,其中彈目距離為150 m時(shí),頻率分辨率為100 Hz。
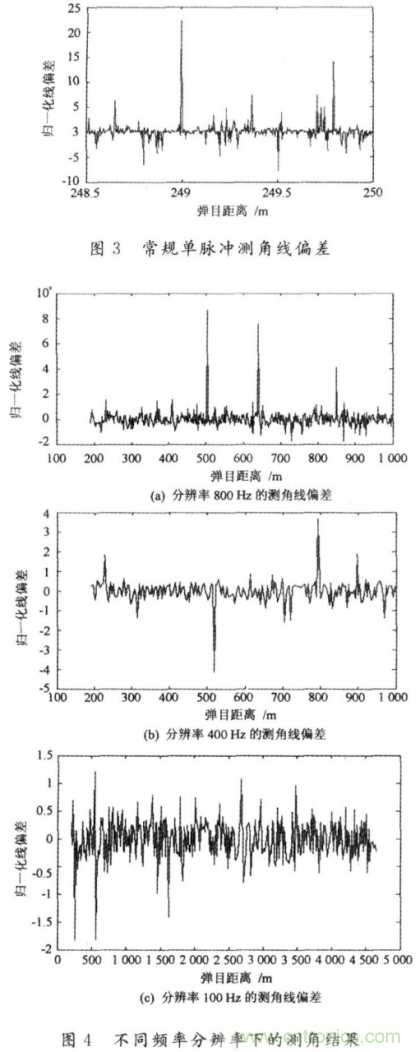
為了驗(yàn)證頻域高分辨測角的效果,圖3、圖4分別給出常規(guī)單脈沖測角和不同頻率分辨率下的測角結(jié)果。其中測角結(jié)果用歸一化的線偏差來表示??梢钥闯龀R?guī)單脈沖測角誤差比較大。分辨率為800 Hz,400 Hz和100Hz的測角結(jié)果如圖4所示??梢钥闯?,測角精度大大提高,并且分辨率越高,測角精度越高。