
【導(dǎo)讀】說到手勢識別大家并不陌生,想得到的是二維手型識別、二維手勢識別、三維手勢識別這幾個名詞,但是到底手勢識別技術(shù)是什么?怎么定義的?又是如何工作的呢?請看下文詳解!
談起手勢識別技術(shù),由簡單粗略的到復(fù)雜精細的,大致可以分為三個等級:二維手型識別、二維手勢識別、三維手勢識別。在具體討論手勢識別之前,我們有必要先知道二維和三維的差別。二維只是一個平面空間,我們可以用(X坐標,Y坐標)組成的坐標信息來表示一個物體在二維空間中的坐標位置,就像是一幅畫出現(xiàn)在一面墻上的位置。三維則在此基礎(chǔ)上增加了“深度”(Z坐標)的信息,這是二維所不包含的。這里的“深度”并不是咱們現(xiàn)實生活中所說的那個深度,這個“深度”表達的是“縱深”,理解為相對于眼睛的“遠度”也許更加貼切。就像是魚缸中的金魚,它可以在你面前上下左右的游動,也可能離你更遠或者更近。
前兩種手勢識別技術(shù),完全是基于二維層面的,它們只需要不含深度信息的二維信息作為輸入即可。就像平時拍照所得的相片就包含了二維信息一樣,我們只需要使用單個攝像頭捕捉到的二維圖像作為輸入,然后通過計算機視覺技術(shù)對輸入的二維圖像進行分析,獲取信息,從而實現(xiàn)手勢識別。
而第三種手勢識別技術(shù),是基于三維層面的。三維手勢識別與二維手勢識別的最根本區(qū)別就在于,三維手勢識別需要的輸入是包含有深度的信息,這就使得三維手勢識別在硬件和軟件兩方面都比二維手勢識別要復(fù)雜得多。對于一般的簡單操作,比如只是想在播放視頻的時候暫?;蛘呃^續(xù)放映,二維手勢也就足夠了。但是對于一些復(fù)雜的人機交互,比如玩游戲或者應(yīng)用在VR(虛擬現(xiàn)實)上,三維手勢實在是居家旅行必備、舍我其誰的不二之選。
手勢識別分類
二維手型識別
二維手型識別,也可稱為靜態(tài)二維手勢識別,識別的是手勢中最簡單的一類。這種技術(shù)在獲取二維信息輸入之后,可以識別幾個靜態(tài)的手勢,比如握拳或者五指張開。其代表公司是一年前被Google收購的Flutter。在使用了他家的軟件之后,用戶可以用幾個手型來控制播放器。用戶將手掌舉起來放到攝像頭前,視頻就開始播放了;再把手掌放到攝像頭前,視頻又暫停了。
“靜態(tài)”是這種二維手勢識別技術(shù)的重要特征,這種技術(shù)只能識別手勢的“狀態(tài)”,而不能感知手勢的“持續(xù)變化”。舉個例子來說,如果將這種技術(shù)用在猜拳上的話,它可以識別出石頭、剪刀和布的手勢狀態(tài)。但是對除此之外的手勢,它就一無所知了。所以這種技術(shù)說到底是一種模式匹配技術(shù),通過計算機視覺算法分析圖像,和預(yù)設(shè)的圖像模式進行比對,從而理解這種手勢的含義。
這種技術(shù)的不足之處顯而易見:只可以識別預(yù)設(shè)好的狀態(tài),拓展性差,控制感很弱,用戶只能實現(xiàn)最基礎(chǔ)的人機交互功能。但是它是識別復(fù)雜手勢的第一步,而且我們的確可以通過手勢和計算機互動了,還是很酷的不是么?想象一下你忙著吃飯,只要憑空做個手勢,計算機就可以切換到下一個視頻,比使用鼠標來控制可是方便多了!
二維手勢識別
二維手勢識別,比起二維手型識別來說稍難一些,但仍然基本不含深度信息,停留在二維的層面上。這種技術(shù)不僅可以識別手型,還可以識別一些簡單的二維手勢動作,比如對著攝像頭揮揮手。其代表公司是來自以色列的PointGrab,EyeSight和ExtremeReality。
二維手勢識別擁有了動態(tài)的特征,可以追蹤手勢的運動,進而識別將手勢和手部運動結(jié)合在一起的復(fù)雜動作。這樣一來,我們就把手勢識別的范圍真正拓展到二維平面了。我們不僅可以通過手勢來控制計算機播放/暫停,我們還可以實現(xiàn)前進/后退/向上翻頁/向下滾動這些需求二維坐標變更信息的復(fù)雜操作了。
這種技術(shù)雖然在硬件要求上和二維手型識別并無區(qū)別,但是得益于更加先進的計算機視覺算法,可以獲得更加豐富的人機交互內(nèi)容。在使用體驗上也提高了一個檔次,從純粹的狀態(tài)控制,變成了比較豐富的平面控制。這種技術(shù)已經(jīng)被集成到了電視里,但是目前還是以噱頭為主,還不能成為電視的主要常用控制方式。
三維手勢識別
接下來我們要談的就是當(dāng)今手勢識別領(lǐng)域的重頭戲——三維手勢識別。三維手勢識別需要的輸入是包含有深度的信息,可以識別各種手型、手勢和動作。相比于前兩種二維手勢識別技術(shù),三維手勢識別不能再只使用單個普通攝像頭,因為單個普通攝像頭無法提供深度信息。要得到深度信息需要特別的硬件,目前世界上主要有3種硬件實現(xiàn)方式。加上新的先進的計算機視覺軟件算法就可以實現(xiàn)三維手勢識別了。下面就讓小編為大家一一道來三維手勢識別的三維成像硬件原理。
1結(jié)構(gòu)光(Structure Light)
結(jié)構(gòu)光的代表應(yīng)用產(chǎn)品就是PrimeSense公司為大名鼎鼎的微軟家XBOX 360所做的Kinect一代了。這種技術(shù)的基本原理是,加載一個激光投射器,在激光投射器外面放一個刻有特定圖樣的光柵,激光通過光柵進行投射成像時會發(fā)生折射,從而使得激光最終在物體表面上的落點產(chǎn)生位移。當(dāng)物體距離激光投射器比較近的時候,折射而產(chǎn)生的位移就較?。划?dāng)物體距離較遠時,折射而產(chǎn)生的位移也就會相應(yīng)的變大。這時使用一個攝像頭來檢測采集投射到物體表面上的圖樣,通過圖樣的位移變化,就能用算法計算出物體的位置和深度信息,進而復(fù)原整個三維空間。
以Kinect一代的結(jié)構(gòu)光技術(shù)來說,因為依賴于激光折射后產(chǎn)生的落點位移,所以在太近的距離上,折射導(dǎo)致的位移尚不明顯,使用該技術(shù)就不能太精確的計算出深度信息,所以1米到4米是其最佳應(yīng)用范圍。
2光飛時間(Time of Flight)
光飛時間是SoftKinetic公司所采用的技術(shù),該公司為業(yè)界巨鱷Intel提供帶手勢識別功能的三維攝像頭。同時,這一硬件技術(shù)也是微軟新一代Kinect所使用的。這種技術(shù)的基本原理是加載一個發(fā)光元件,發(fā)光元件發(fā)出的光子在碰到物體表面后會反射回來。使用一個特別的CMOS傳感器來捕捉這些由發(fā)光元件發(fā)出、又從物體表面反射回來的光子,就能得到光子的飛行時間。根據(jù)光子飛行時間進而可以推算出光子飛行的距離,也就得到了物體的深度信息。
就計算上而言,光飛時間是三維手勢識別中最簡單的,不需要任何計算機視覺方面的計算。
3多角成像(Multi-camera)
多角成像這一技術(shù)的代表產(chǎn)品是Leap Motion公司的同名產(chǎn)品和Usens公司的Fingo。
這種技術(shù)的基本原理是使用兩個或者兩個以上的攝像頭同時攝取圖像,就好像是人類用雙眼、昆蟲用多目復(fù)眼來觀察世界,通過比對這些不同攝像頭在同一時刻獲得的圖像的差別,使用算法來計算深度信息,從而多角三維成像。
在這里我們以兩個攝像頭成像來簡單解釋一下:
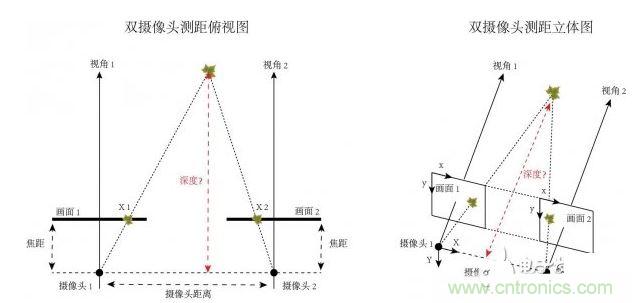
雙攝像頭測距是根據(jù)幾何原理來計算深度信息的。使用兩臺攝像機對當(dāng)前環(huán)境進行拍攝,得到兩幅針對同一環(huán)境的不同視角照片,實際上就是模擬了人眼工作的原理。因為兩臺攝像機的各項參數(shù)以及它們之間相對位置的關(guān)系是已知的,只要找出相同物體(楓葉)在不同畫面中的位置,我們就能通過算法計算出這個物體(楓葉)距離攝像頭的深度了。
多角成像是三維手勢識別技術(shù)中硬件要求最低,但同時是最難實現(xiàn)的。多角成像不需要任何額外的特殊設(shè)備,完全依賴于計算機視覺算法來匹配兩張圖片里的相同目標。相比于結(jié)構(gòu)光或者光飛時間這兩種技術(shù)成本高、功耗大的缺點,多角成像能提供“價廉物美”的三維手勢識別效果。
