
【導(dǎo)讀】本文將深入探討,使用雙軸加速度傳感器相比較單軸加速度傳感器有什么優(yōu)勢。以及如何根據(jù)項目要求計算加速度傳感器的最小靈敏度,以及如何選型。
雙軸加速度傳感器三個優(yōu)勢
降低與重力平面對齊的要求
對于單軸加速度傳感器,加速度傳感器的輸出為Ax=sin(θ)*1g,如果檢測軸與重力平面沒有很好的對齊,會影響重力加速度在檢測軸上的分量,從而影響檢測精度。
設(shè)置雙軸加速度傳感器,X軸與重力平面垂直,Y軸與重力平面平行。加速度傳感器X軸輸出值與θ的正弦值成比例Ax=sin(θ)*1g,Y軸輸出值與θ的余弦值A(chǔ)y=cos(θ)*1g成比例。我們也可以把加速度傳感器X軸與Y軸輸出值相除,得到Ax/Ay = sin(θ)*1g / cos(θ)*1g =tan(θ)。這時我們可以看到,重力加速度g不再公式里面了。這代表即使XY平面與重力平面存在一定傾斜,也可以確保檢測XY平面上傾斜角的精準(zhǔn)度。這個特性彌補了單軸加速度傳感器必須與重力平面對齊這一缺陷。
檢測角度可以擴展到360°
當(dāng)360°旋轉(zhuǎn)單軸加速度傳感器時,每個加速度傳感器輸出值A(chǔ)x可能會對應(yīng)兩個角度。
如下圖,當(dāng)角度在90°到270°,單軸加速度傳感器輸出值A(chǔ)x與角度一一對應(yīng),超過這個范圍,每個輸出值A(chǔ)x在360°范圍內(nèi),對應(yīng)兩個傾斜角度,無法有效的區(qū)分。
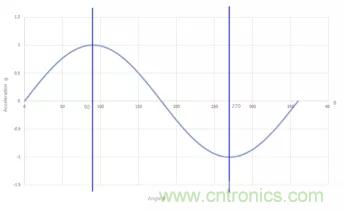
圖1:單軸加速度傳感器360°旋轉(zhuǎn)對應(yīng)輸出
而當(dāng)我們使用雙軸加速度傳感器檢測360°范圍傾斜角時,設(shè)加速度傳感器兩個輸出軸Ax與Ay。并且兩個輸出軸互相垂直,這樣我們便可通過Ax與Ay的正負(fù)值來判斷旋轉(zhuǎn)角度的范圍,從而使得雙軸加速度傳感器輸出值與傾斜角度在360°范圍內(nèi)一一對應(yīng)
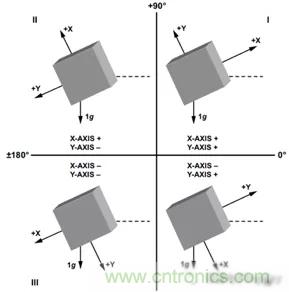
圖2:不同象限與加速度輸出值正負(fù)的關(guān)系
如上圖,根據(jù)Ax與Ay的正負(fù)可以把XY平面傾斜角度分成4個象限:
第一象限:Ax+與Ay+
第二象限:Ax+與Ay-
第三象限:Ax-與Ay-
第四象限:Ax-與Ay+
然后,可以根據(jù)Ax與Ay的比值確定具體角度。
靈敏度基本恒定
雙軸加速度傳感器當(dāng)θ在60°到90°變化時,X軸輸出值相對傾斜角的靈敏度下降,同時Y軸輸出相對傾斜角的靈敏度升高,兩者很好的相互補充。
設(shè)置雙軸加速度傳感器,X軸與重力平面垂直,Y軸與重力平面平行。加速度傳感器X軸輸出值與θ的正弦值成比例Ax=sin(θ)*1g,Y軸輸出值與θ的余弦值A(chǔ)y=cos(θ)*1g成比例。把加速度傳感器X軸與Y軸輸出值相除,得到Ax/Ay = sin(θ)*1g / cos(θ)*1g =tan(θ)。
根據(jù)tan(θ)函數(shù)特性可以看出,隨著θ增大,增量靈敏度越來越高。同時可以看出,如果要計算系統(tǒng)最小靈敏度,可以取θ=0時輸出變化的增量。根據(jù)公式Ax=sin(θ)*1g,可以近似計算最小靈敏度。當(dāng)θ=0時,S[g]= ΔAx= sin(P)*1g , 其中P為系統(tǒng)要求的最小步長。
假設(shè)應(yīng)用要求最小分辨率為1°。取θ=0,步長P為1°時,靈敏度S[g]= sin(1°)=17.45mg/1°。即對應(yīng)數(shù)字輸出加速度傳感器,每個LSB要區(qū)分17.45mg輸出,那么對應(yīng)靈敏度最少是58LSB/g (1g/17.45mg)。
加速度傳感器的靈敏度選型
在Digi-Key上,可以根據(jù)參數(shù)篩選電子元器件的功能。對于加速度傳感器,列出了靈敏度的參數(shù)欄。
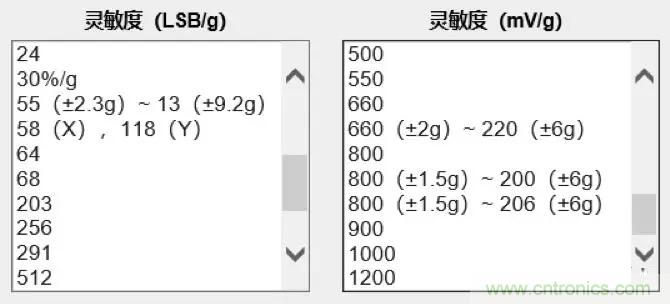
圖3,Digi-Key提供根據(jù)參數(shù)篩選電子元器件的功能
靈敏度(LSB/g)主要針對數(shù)字輸出加速度傳感器,代表一個重力加速度(g)下,輸出能區(qū)分多少位LSB。上面已經(jīng)根據(jù)應(yīng)用要求推導(dǎo)出,假設(shè)應(yīng)用要求最小分辨率為1°,靈敏度需要大于58LSB/g。那么可以根據(jù)這一結(jié)果直接在參數(shù)欄里選擇。
在參數(shù)篩選列表我們可能會發(fā)現(xiàn),%/g來表示靈敏度。這個一般用在輸出為占空比的加速度傳感器。舉例:ADI的ADXL213AE輸出信號為占空比調(diào)制的數(shù)字信號,與加速度成比例。0g偏置=50%占空比,增加一個重力加速度,占空比改變30%。
靈敏度(mV/g)主要針對模擬輸出加速度傳感器,代表1個重力加速度下,輸出電壓的幅值。對應(yīng)于模擬輸出加速度傳感器。舉個例子:ADI的ADXL203CE,其中對應(yīng)靈敏度為1000mV/g。應(yīng)用要求最小分辨率為1°,根據(jù)上面推導(dǎo)至少需要能夠分辨17.45mg/1°。那么后續(xù)的檢測電路至少需要分辨17.45mV(1000mV*17.45mg/1g)的信號。
本文小結(jié)
雙軸加速度傳感器在檢測傾斜角時,由于靈敏度基本恒定,相比較單軸加速度傳感器而言,減小了對加速度傳感器靈敏度的要求。同時,雙軸加速度傳感器不需要與重力平面對齊,并且實現(xiàn)了360°傾斜角檢測。
有關(guān)三軸加速度傳感器傾斜角檢測時,相對于單軸/雙軸加速度傳感器,有什么優(yōu)勢,又有什么特點,敬請大家繼續(xù)關(guān)注我們。
