
【導讀】目前,汽車中應用的雷達模組是相對比較笨拙的系統(tǒng),包含了多個基于不同工藝的芯片。因此,為了追求更小的尺寸和更低的成本,Infineon(英飛凌)、NXP(恩智浦)、Renesas(瑞薩)以及TI(德州儀器)正在開發(fā)在同一個器件上整合多個元件的集成雷達芯片組。
汽車市場對視覺、雷達和LiDAR(激光雷達)傳感器的需求不斷增長,因為這些傳感器能夠實現先進輔助駕駛(ADAS)和自動/無人駕駛功能,不僅如此,汽車制造商還對傳感器供應商提出了更加苛刻的新要求。
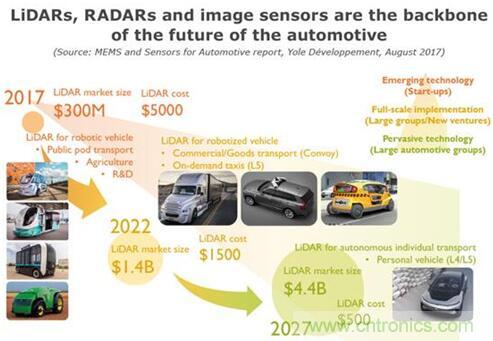
LiDAR、雷達以及圖像傳感器是未來自動駕駛汽車的核心支柱,圖片引自《汽車MEMS和傳感器市場及技術趨勢-2017版》
汽車市場對供應商的要求一直很高。OEM廠商為了實現ADAS和自動駕駛技術,希望相關傳感器在提升安全性的同時,尺寸能夠更小、速度更快且成本更低。通常,ADAS包括多種安全功能,例如自動緊急制動、車道監(jiān)測以及障礙物警示等。
雷達,是一種障礙物探測技術,用于汽車盲點探測及其它安全功能。“近年來,雷達模組的尺寸獲得了大幅縮小,其散熱要求也越來越高,”NXP(恩智浦)產品線經理Thomas Wilson說,“市場對雷達性能的要求越來越高,而尺寸要求不斷縮小,因此成本壓力越來越大。”
目前,汽車中應用的雷達模組是相對比較笨拙的系統(tǒng),包含了多個基于不同工藝的芯片。因此,為了追求更小的尺寸和更低的成本,Infineon(英飛凌)、NXP(恩智浦)、Renesas(瑞薩)以及TI(德州儀器)正在開發(fā)在同一個器件上整合多個元件的集成雷達芯片組。
盡管這些雷達芯片組可以針對多種不同的ADAS應用,但是,它們也代表了一種新的設計趨勢。IC制造商將不再采用多種不同的工藝來制造各種芯片,而是采用45nm和28nm的標準CMOS工藝來集成雷達器件。當然,其它可選工藝還包括22nm體硅工藝和FD-SOI(全耗盡型絕緣硅)工藝。
實現ADAS和自動駕駛的另一種核心技術,激光雷達(LiDAR),是一種利用脈沖激光來測量目標距離的技術,也正從笨重的機械旋轉掃描系統(tǒng),向集成更多元件、尺寸更小的固態(tài)單元發(fā)展,以降低高昂的制造成本。
雷達業(yè)界正在開發(fā)下一代高分辨率雷達,以期替代昂貴的LiDAR,不過,LiDAR開發(fā)商也并沒有閑著。
事實上,目前并沒有任何一種技術能夠滿足所有ADAS或自動/無人駕駛要求。如今,有些汽車已經集成了先進的視覺系統(tǒng)和雷達系統(tǒng)。接下來,它們或許還會裝配LiDAR,這意味著視覺系統(tǒng)、雷達和LiDAR技術將在一定時期內和諧共存,共同實現汽車ADAS及未來的自動駕駛功能。
每一種技術都有其優(yōu)勢和短板。“LiDAR相比視覺和雷達,是一種昂貴得多的傳感器系統(tǒng),但是,它在目標識別方面精度更高。不過,LiDAR在雪、雨、霧等惡劣的氣候條件下也有其局限性。” Semico Research公司總裁Jim Feldhan說,“雷達似乎不太會受到天氣條件的影響,但是雷達無法像LiDAR那樣精確的確定目標物體的尺寸和形狀。”
共同的目標:安全性更高的汽車
為了制造安全性更高的汽車,汽車制造商急需這些專門針對車輛安全性的環(huán)境感知技術。據美國國家高速公路交通安全管理局統(tǒng)計,94%的嚴重車輛事故都是由于駕駛員的操作失誤而造成的。
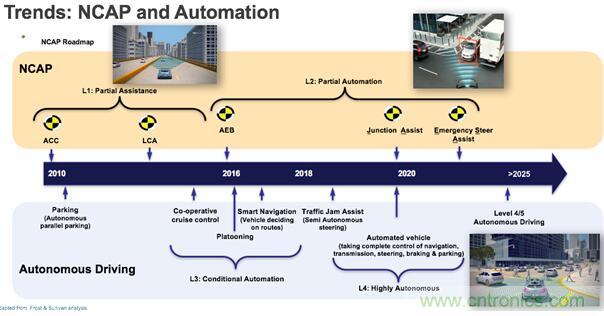
為此,近年來汽車產業(yè)為車輛配備了越來越多的主被動安全功能。據NXP的Wilson介紹,目前產業(yè)正朝著兩條殊途同歸的路徑發(fā)展,即新車評價規(guī)程(NCAP)和自動駕駛技術。
近年來,亞洲、歐洲和美國推出了各自的NCAP指南。在這些新車評價規(guī)程中,汽車經過相應測試,基于車輛安全性給予星級評價。五星評價為最高等級,一星則最低。
“這種五星評價體系對車輛銷售產生了巨大影響。越來越多的消費者傾向購買擁有五星評價的車輛,因為這類車輛的安全性更高,并且,保險費用也更低,”Wilson稱。
每個主要地區(qū)都有自己的NCAP標準。但簡單來說,基本的NCAP標準都包含了多種ADAS技術,例如自適應巡航控制、自動緊急制動、并線輔助、車道保持等。
NCAP及自動駕駛趨勢
自適應巡航控制,能夠幫助汽車在車流中,自動調整車速、保證與前車的安全距離,進行自動巡航。自動緊急制動功能,能夠在車輛感知到有可能發(fā)生碰撞事故前,自動進行車輛制動。
車道保持功能,能夠幫助車輛保持在一個車道中巡航行駛,避免不安全的車道變更。而并線輔助功能,能夠在車輛轉彎或變換車道時,探測后方或側方是否有車輛等障礙物,向駕駛員發(fā)出警示或制動車輛。
NCAP發(fā)展路徑圖推動了在汽車中集成更多的傳感器。“例如,自動緊急制動功能,即需要攝像頭,也需要雷達傳感器,” GlobalFoundries(格羅方德)汽車事業(yè)部副總裁Mark Granger說,“這種技術已經開始從超豪華汽車,下放到更多的中端車型中。”
除了NCAP之外,汽車制造商還朝著包括自動駕駛汽車在內的另一條道路發(fā)展,自動駕駛技術也在推動攝像頭、LiDAR和雷達的需求增長。盡管,十年或更久之內,全自動駕駛汽車并不會成為市場主流。
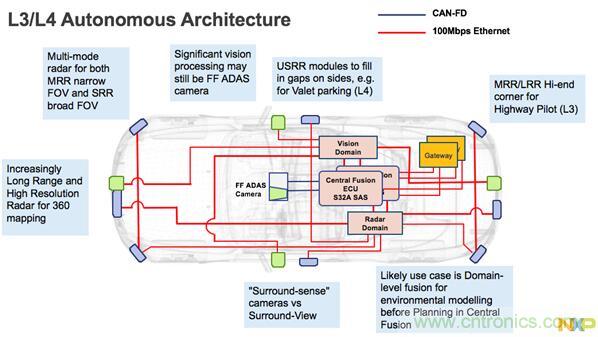
L3/L4級自動駕駛架構
任何一種ADAS技術或自動駕駛技術都僅是實現自動駕駛架構的一部分,它們必須能夠無縫銜接地協(xié)同工作。
“例如,應用日益增長的V2V(車輛與車輛的互聯)以及V2X(車輛與萬物的互聯),意味著需要更多的車載雷達系統(tǒng),”UMC市場部副總裁Steven Liu說,“這些系統(tǒng)還需要其它技術提供支持,包括汽車防碰撞雷達,全球定位系統(tǒng),與交通信號燈及車輛調度進行識別和交互的傳感器等。這些系統(tǒng)都需要與車輛現有系統(tǒng)相結合,如駕乘舒適及娛樂控制系統(tǒng),以及控制溫度、胎壓及燃油的引擎監(jiān)控子系統(tǒng)等。”
你是我的眼
據報道,汽車制造商同時采用多種方案來實現ADAS。例如,Tesla(特斯拉)生產的車型搭載了8個攝像頭,12個超聲波傳感器和雷達。超聲波傳感器利用聲波來測量車輛與物體之間的距離。
Tesla目前還沒有采用LiDAR,是因為LiDAR技術成本太高昂。其它正在開發(fā)自動駕駛汽車的廠商,或將在其車輛中同時應用攝像頭、雷達和LiDAR。
不管在那種方案中,先進的視覺系統(tǒng)都是實現自動駕駛的核心部件。“近年來,基于攝像頭的傳感器已經能夠提供廣泛的測距功能,例如路標探測、車道偏離預警、遠近光控制、泊車輔助以及駕駛員狀態(tài)監(jiān)測等,”TowerJazz公司CMOS圖像傳感器業(yè)務部高級副總裁兼總經理Avi Strum說。

大陸MFC430TA、采埃孚-天合S-Cam 3和博世MPC2汽車ADAS攝像頭對比分析,圖片引自《大陸汽車ADAS攝像頭:MFC430TA》
但是,攝像頭仍無法提供所有的安全功能。“事實上,Mobileye等廠商堅信,僅憑基于攝像頭的傳感器便能提供完整的ADAS解決方案,”Strum說,“雖然基于攝像頭的傳感器能夠在光照良好的條件下,以卓越的分辨率感知周圍環(huán)境,但是在黑暗、雨、霧、雪等惡劣環(huán)境下,這類傳感器的性能便會大幅下滑。”
這意味著基于攝像頭的傳感器還有很大的改善空間,尤其在動態(tài)范圍和近紅外靈敏度等方面,Strum補充道。
“雷達波”帶你浪
雷達也是ADAS和自動駕駛的核心技術之一。簡而言之,雷達通過發(fā)射毫米波范圍的電磁波,電磁波遇到障礙物后發(fā)生反射,被雷達系統(tǒng)捕獲,由此計算便能確定障礙物的距離、速度和角度。
通常,OEM廠商會在車輛中采用短距離和長距離雷達。自適應巡航控制和自動緊急制動功能采用長距離雷達(LRR)。長距離雷達一般裝配在車輛前保險杠后方。
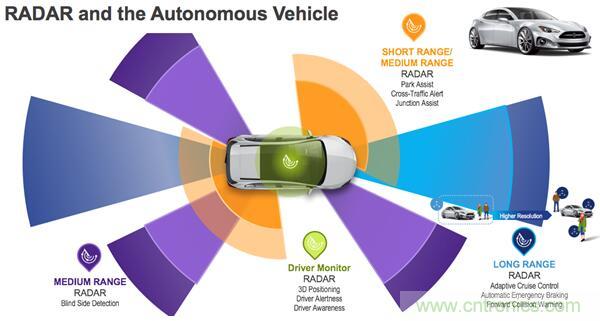
雷達和自動駕駛汽車
前向長距離雷達采用77GHz毫米波頻率,探測范圍覆蓋160~200米。通常,前向雷達模組集成了多種不同的組件,例如微控制器(MCU)和RF(射頻)收發(fā)器。收發(fā)器負責將雷達數據通過鏈接傳送給MCU,由MCU進行雷達數據處理。
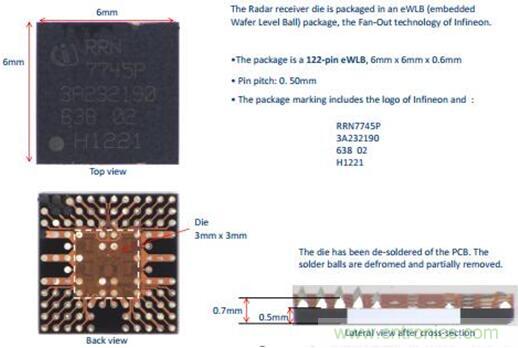
《英飛凌77 GHz雷達接收器和發(fā)射器:RRN7745P和RTN7735P》
MCU的制造往往基于CMOS工藝,正從55nm或40nm工藝向28nm及以下工藝節(jié)點轉移。同時,單獨的RF收發(fā)器一般基于高性能SiGe(硅鍺)RF工藝。也有采用BiCMOS工藝。兩種技術都源自更成熟的工藝節(jié)點。
前向長距離雷達仍將保持在77GHz頻段,但是器件技術正在發(fā)展。以近期的新產品為例,TI推出了一款單芯片雷達產品,在同一個器件上整合了MCU和收發(fā)器。這款雷達芯片組基于45nm RF CMOS工藝,實現了不同組件的集成。
“單芯片雷達傳感器解決方案相比雙芯片解決方案,具有諸多優(yōu)勢,”TI產品經理Kishore Ramaiah說,“因為這是一種RF CMOS解決方案,它具有更低的功耗和更高的集成度,這意味著能夠帶來更小的尺寸和更優(yōu)化的BOM。”
不過,至少目前來看,前向長距離雷達或仍將大部分采用分立解決方案。“長距離雷達模組設計還存在很多變數,我認為MCU和收發(fā)器還將在一定時間內保持分立設計,”NXP公司的Wilson說,“隨著時間的發(fā)展,當RF CMOS技術發(fā)展到能夠支持長距離雷達的RF性能要求時,它相比SiGe技術才會更有競爭力。我預計這兩種解決方案將在一段時期內共存。”
而短距離(SRR)雷達模組方面則有了切實的設計革新,目前大多數短距離雷達模組的工作頻率為24GHz,探測距離約60~70米。
安裝在汽車前后方兩角的短距離雷達模組,可用于車道探測、車道保持等相關功能。同時,并線輔助功能也采用安裝在前部側方保險杠的短距離雷達。
為了使車輛獲得更先進的ADAS功能,短距離雷達正從24GHz向更高性能的79GHz更替。采用79GHz是為了避免和前向77GHz長距離雷達發(fā)生干擾。
裝配于車輛后方兩角的雷達模組也正在從分立模式向芯片組解決方案過渡。“市場對集成收發(fā)器和MCU的RF CMOS方案很感興趣。但是,相對前向長距離雷達,市場更傾向于在車輛四角的短距離雷達上應用芯片組集成解決方案,因為這些雷達需要尺寸做的更小,并且對成本更加敏感,”Wilson說。
對于這類雷達模組,OEM廠商提供了多種方案。如上所述,TI提供了采用45nm RF CMOS工藝的芯片組。而ADI和Renesas正在開發(fā)一款采用28nm RF CMOS工藝的77/79 GHz的雷達器件。同時,GlobalFoundries則提供22nm FD-SOI工藝,一種在襯底中加入薄絕緣層以抑制漏損的技術。
和體硅CMOS工藝類似,FD-SOI工藝能夠使芯片制造商集成包括雷達芯片在內的多種元件。而且,FD-SOI還能解決其它問題。“一顆雷達單元的功耗已經很高了。如果集成了多個雷達器件,系統(tǒng)散熱將成為一個大問題,” GlobalFoundries產品線管理高級總監(jiān)Bert Fransis說,“而體硅CMOS工藝無法解決這種問題。采用FD-SOI工藝,則能使每款雷達解決方案的功耗降低至1 watt以下。”
當然,還有較傳統(tǒng)的選擇方案,采用單獨的基于SiGe的雷達收發(fā)器。“基于SiGe的短距離和長距離雷達能夠滿足汽車雷達系統(tǒng)的要求,”TowerJazz市場戰(zhàn)略高級總監(jiān)Amol Kalburge說,“采用SiGe方案最重要的是,同一顆芯片上的發(fā)射端功率放大器和接收端低噪音放大器之間的完整集成,才能使系統(tǒng)獲得最優(yōu)的性能和更低的成本。”
如上所述,雷達系統(tǒng)對于ADAS和自動駕駛應用來說,有優(yōu)勢也有劣勢。“雷達傳感器相對來說尺寸比較緊湊,成本效益也高,因此,現在已經被OEM廠商大量采用,”Kalburge說道,“目前的汽車雷達解決方案,其分辨率還不足以應對全自動駕駛應用,現在正在開發(fā)新的硬件和軟件解決方案來提高雷達系統(tǒng)的分辨率。”
事實上,業(yè)界正在努力開發(fā)下一代雷達。其中一個目標便是縮小與LiDAR之間的分辨率差距,或能進一步取代LiDAR。“未來,我們或將看到雷達和LiDAR之間的激烈競爭,”GlobalFoundries公司的Granger說。
雷達研發(fā)方面,Imec(歐洲微電子研究中心)目前正在開發(fā)140GHz雷達技術。也有其它廠商及研究機構正在研究成像雷達技術。“雷達技術一直在不斷發(fā)展,”National Instruments(國家儀器)公司的市場技術專家Marcus Monroe說,“新的天線設計和先進的處理算法將為雷達帶來更高的性能和全新的功能,使其能夠用于之前無法勝任的應用場景,例如行人探測等。”
那么成像雷達又是什么鬼?“成像雷達是一種雷達應用,通過快速產生的雷達脈沖,利用反射的雷達能量來創(chuàng)建2D或3D圖像。這種技術在航天產業(yè)已經應用多年,例如陸地測繪和氣象監(jiān)測等。這種技術還沒有用在汽車雷達上,可能是由于功耗和處理能力限制,”Monroe說。
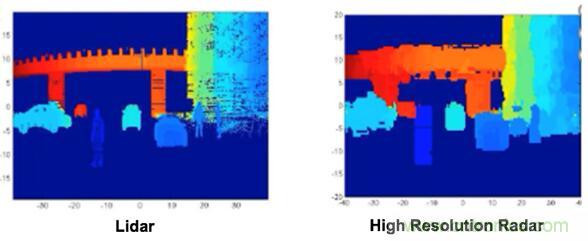
LiDAR VS. 高分辨率雷達
高大上的LiDAR
LiDAR技術一直在進步。這項技術可以應用于自動駕駛汽車,但不僅限于該應用。“大家會看到LiDAR和攝像頭、雷達一起聯合應用于ADAS系統(tǒng),”全球最知名的汽車LiDAR供應商Velodyne公司首席技術官Anand Gopalan說。
LiDAR和雷達不同。“LiDAR通過發(fā)射一系列脈沖激光,然后測量激光反射回來的飛行時間,”Gopalan解釋道,“再利用這些數據創(chuàng)建周圍環(huán)境的3D、高分辨率地圖。”
LiDAR目前還面臨很多技術挑戰(zhàn),它包含了很多運動部件,而且價格十分昂貴,但是,這一切都正在改變。根據Yole的數據,一般情況下,汽車攝像頭模塊的售價大約30美元,而LiDAR系統(tǒng)的售價則高達3000美元以上。但是,現在新開發(fā)的LiDAR系統(tǒng)正朝著300美元以下而努力。

《大陸集團最先進的ADAS激光雷達:SRL1》
根據著名市場研究機構Frost and Sullivan研究,現在,主要有三種LiDAR技術方案——機械、MEMS以及混合固態(tài)技術。機械LiDAR主要用于高端工業(yè)市場,而基于MEMS技術的LiDAR解決方案剛剛興起。
目前,有許多創(chuàng)業(yè)公司正在研究尺寸更小、更加緊湊的固態(tài)LIDAR系統(tǒng)。固態(tài)LiDAR不含或僅含很少的可動部件。

Velodyne公司目前的主力LiDAR產品
LiDAR采用的主要核心組件包括,激光二極管、光電探測器以及處理單元。
據Frost and Sullivan介紹,LiDAR利用激光二極管發(fā)射一束波長905nm的脈沖激光,投射出100萬個光子,不過,僅有1個光子能夠反射回系統(tǒng)。
因此,LiDAR制造商在系統(tǒng)中集成了最多64個激光器,來提高發(fā)射出的光子數量。通過激光器每發(fā)射10億個光子,大約能收集到1000個反射回來的光子。此時,便利用系統(tǒng)中的光電探測器來感知并捕獲一定視場角(field of view)內反射回來的光子信號。因此,太陽光和天氣條件可能會影響探測器的信噪比。
光電探測器通過計算反射光子的飛行時間,便能計算獲得LiDAR與物體之間的距離。“信號處理非常復雜,需要采用FPGA(現場可編程門陣列)或處理器等高密度處理單元,”Velodyne公司的Gopalan說。
一直以來,LiDAR都朝著集成更多功能,同時不斷降低成本的目標而努力。“我們采用了自己開發(fā)的ASIC技術,將很多重要的功能集成到一組ASIC中,”Gopalan說,“短期內,我們不認為可以在一顆單芯片上集成完整的LiDAR系統(tǒng),但是會盡可能的朝這個方向努力。市場將會看到一款高度集成的、具有完整功能的多芯片LiDAR模組。”
LiDAR中的其它組件也在朝著高度集成化發(fā)展,例如激光二極管驅動器,它負責為激光二極管提供電流。
例如,Velodyne采用了來自EPC公司(宜普電源轉換公司)的基于GaN(氮化鎵)技術的激光二極管驅動器芯片。據EPC公司首席執(zhí)行官Alex Lidow稱,基于GaN技術的開關速度比硅技術要快100倍。
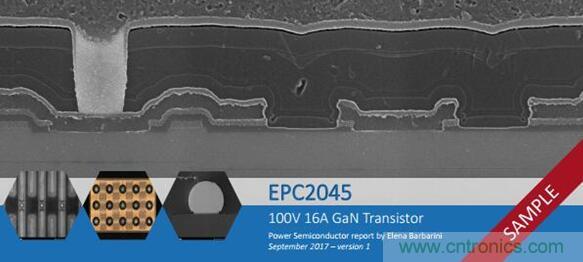
EPC第五代低壓(100V)GaN晶體管,圖片引自《EPC增強型GaN-on-Silicon功率晶體管:EPC2045》
“得益于GaN器件的快速開關速度、高電壓和高電流性能,激光器每次脈沖的時間更短,發(fā)射的光子數量更多,”Lidow說,“因此,LiDAR系統(tǒng)能夠‘看’得更遠,分辨率更高,更快地創(chuàng)建周圍環(huán)境的3D數字地圖。”
基于GaN的激光二極管驅動器占據LiDAR系統(tǒng)總成本的不到5%。“GaN晶體管已經逐漸被GaN集成電路所取代,將在改善性能的同時進一步降低系統(tǒng)成本,”Lidow說。
EPC的GaN激光二極管驅動器由Episil(漢磊)的代工廠加工制造,基于350nm工藝。隨著時間的推移,EPC計劃逐步遷移至130nm工藝。
LiDAR系統(tǒng)中另一個關鍵組件是光電二極管,一種負責將光信號轉換為電信號的半導體器件。對于LiDAR應用,目前主要有四類光電二極管:pin光電二極管、雪崩光電二極管(APD)、單光子雪崩二極管(SPAD)以及硅光電倍增管(SiPMs)。
“探測器技術的選擇主要取決于波長的選擇,” Gopalan說,“在905nm波段,硅APD在增益和信噪比方面仍是最可靠的技術。SiPMs仍極具前景,但是它們在LiDAR系統(tǒng)級的信噪比優(yōu)勢還有待進一步證明。”
那么未來這些技術將如何發(fā)展?攝像頭、LiDAR以及雷達,很有可能將和諧共存。“這些技術各自都無法單獨支撐ADAS或自動駕駛系統(tǒng),” Gopalan說,“對于雷達來說,相比LiDAR,它還有很大的空間來增強數據、補充環(huán)境感知信息。而攝像頭,也將繼續(xù)作為第三種傳感器,成為LiDAR和雷達的最佳‘隊友’。”
(來源:麥姆斯咨詢)
推薦閱讀:
